
|
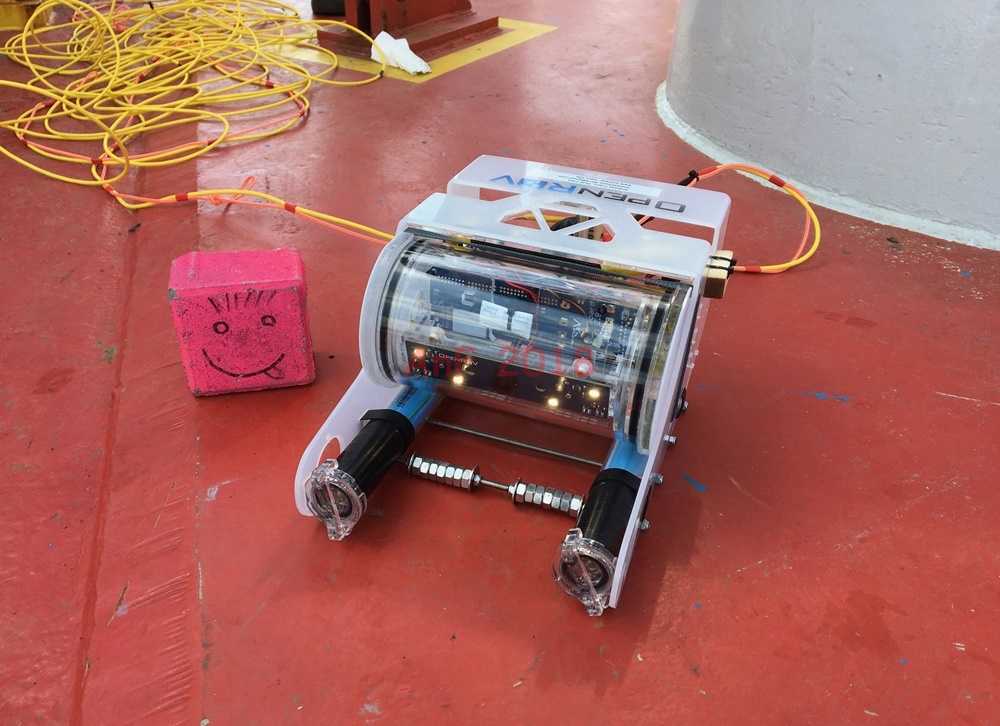
Das OpenROV Projekt bietet die Möglichkeit, ein eigenes (kleines) ROV aus Einzelteilen zusammenzubauen und auch zu erweitern. Als Pilot und Techniker in diesem Bereich ist das natürlich nicht nur eine gute Übung, sondern auch ein sinnvolles "Spielzeug" für mich. Insbesondere da es an meinem Wohnort sehr viele Teiche aus der Zeit des Harzer Bergbaus gibt. Ich werde den Bau und auch die Einsätze des ROV's an dieser Stelle ein wenig dokumentieren(antichronologisch sortiert). Bei Fragen stehe ich gerne per E-Mail zur Verfügung. Vielleicht finden sich ja sogar ungeahnte Schätze in den dunklen Tiefen des Harzer Wassers ... |
| 23.Juni 2019, Clausthal-Zellerfeld | |
| Die nächste Erkundung in einem der Clausthaler Teiche sollte ein paar interessante Bilder einer hölzernen Konstruktion im Wasser liefern. Dies gelang auch, nahm aber aufgrund technischer Probleme eine leider unerwartete Wendung. Vermutlich durch Feuchtigkeit und/oder Wasser in der Elektronik war eine konsistente Steuerung nicht mehr möglich und ich musste die Erkundung leider abbrechen. Dieses Erlebnis zeigt aber deutlich: trotz bester Vorbereitung kann immer etwas schief gehen! Das nennt man dann wohl Erfahrung ... | |
|
OpenROV Gallerie öffnen |


|
| 29.September 2018, Langer Teich, Clausthal-Zellerfeld | |
|
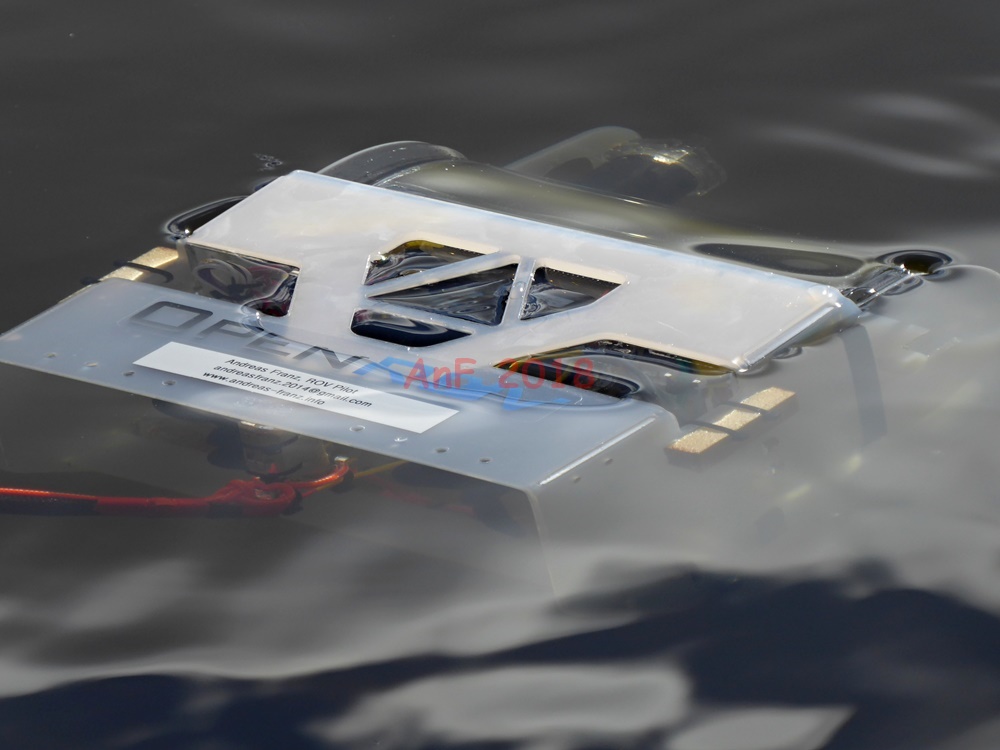
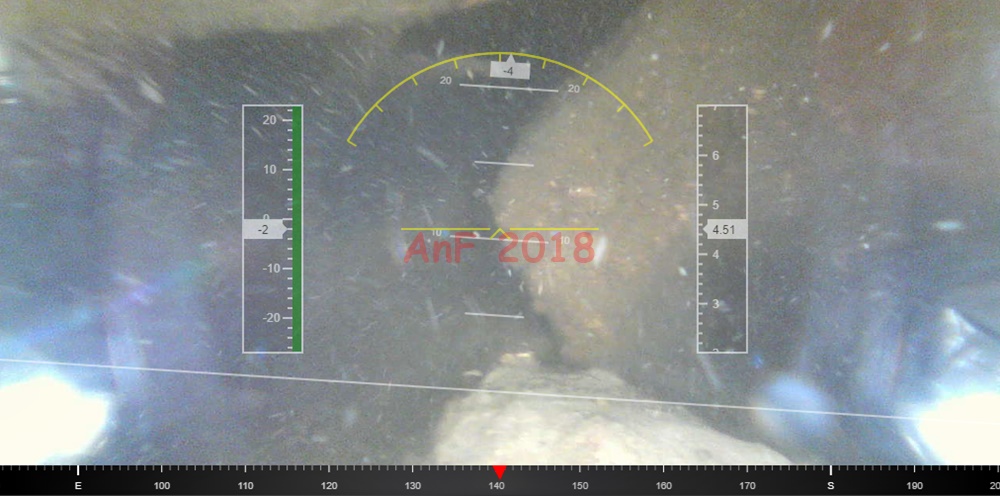
In Anbetracht von über 60 Teichen rund um Clausthal-Zellerfeld, die alle noch aus den Zeiten des Bergbaus stammen und auch
Bestandteil des Oberharzer Wasserregals sind, liegt es nahe diese stückweise mit dem ROV zu erkunden. Natürlich
ist nicht viel mehr zu erwarten als Schlamm und Steine ... aber wer weiß, was man vielleicht durch Zufall entdecken
kann. Die Sicht vor Ort präsentierte sich eher bescheiden, stellt sich in den Fotos aber dann doch etwas besser dar. Auch das Interesse einiger Wanderer war sehr erfreulich. Und die Technik hat einwandfrei funktioniert, wenn auch die Steuerung etwas unpräzise ist - aber das wußte ich ja bereits im Vorfeld. |
|
|
OpenROV Gallerie öffnen |









|
| 29.Juli 2018 | |
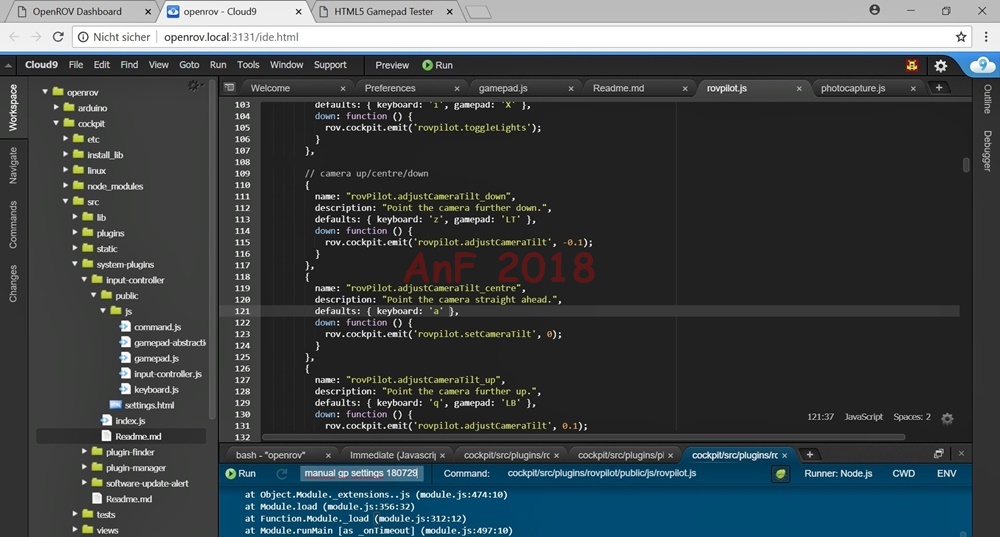
| Dass das ROV neben der Tastatur des Notebooks auch mit einem Gamepad gesteuert werden kann, ist ein angenehmer Vorteil. Allerdings ist die Standardbelegung des Gamepads (für mich) nicht optimal. Um diese abzuändern, muss man allerdings direkt in die Programmierung eingreifen und die korrekte Javascript-Datei finden. Teils sind dabei auch mehrere miteinander verknüpfte Funktionen zu berücksichtigen. Allerdings ist eine konkrete Aufgabenstellung wie diese auch die beste Möglichkeit, mehr über die Programmierung zu lernen. | |
|
OpenROV Gallerie öffnen |
|
| 27.Juni 2018 | |
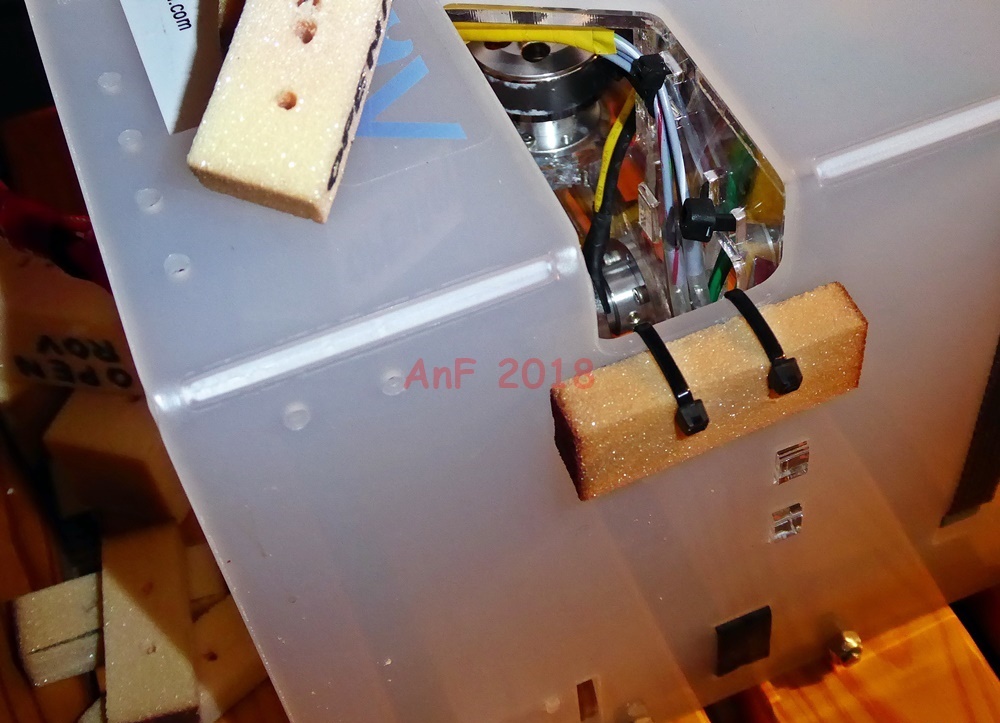
| Zur besseren Ausbalancierung des ROV habe ich ein paar zusätzliche Fixpunkte für das Auftriebsmaterial geschaffen. Dieses kann nun relativ schnell und leicht durch Kabelbinder befestigt werden. Auf die Stabilität des Rahmens sollte dies erwartungsgemäß keinen Einfluß haben. | |
|
OpenROV Gallerie öffnen |

|
| 19.Mai 2018 | |
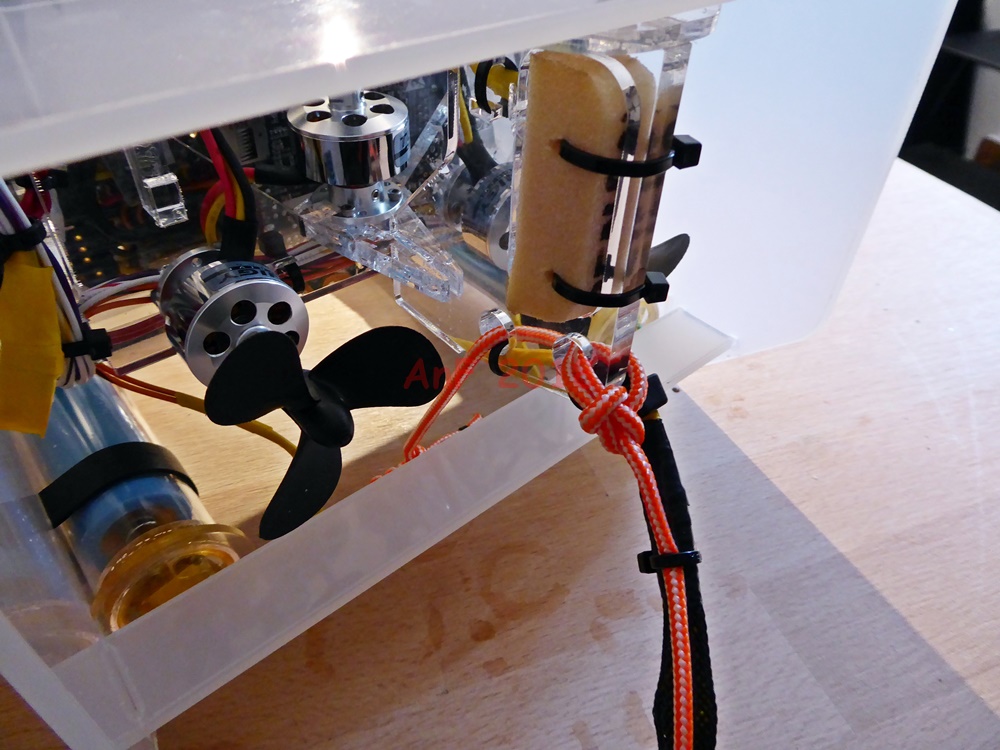
| Der erste Einsatz hat gezeigt, dass die mehr oder weniger starre Verbindung des Kabels zum ROV durch die Führung entlang eines dicken Kabelbinders die Drehung des ROV in eine Richtung spürbar behindert. Die Verbindung habe ich gekappt und die Last über das dünne Sicherungsseil vom Kabel auf das ROV übertragen. Der Kabelbinder versteift das Kabel in diesem Bereich nur noch, damit es nicht in einen der Propeller geraten kann. | |
|
OpenROV Gallerie öffnen |

|
| 19.Mai 2018, Ostsee, nahe Lubmin | |
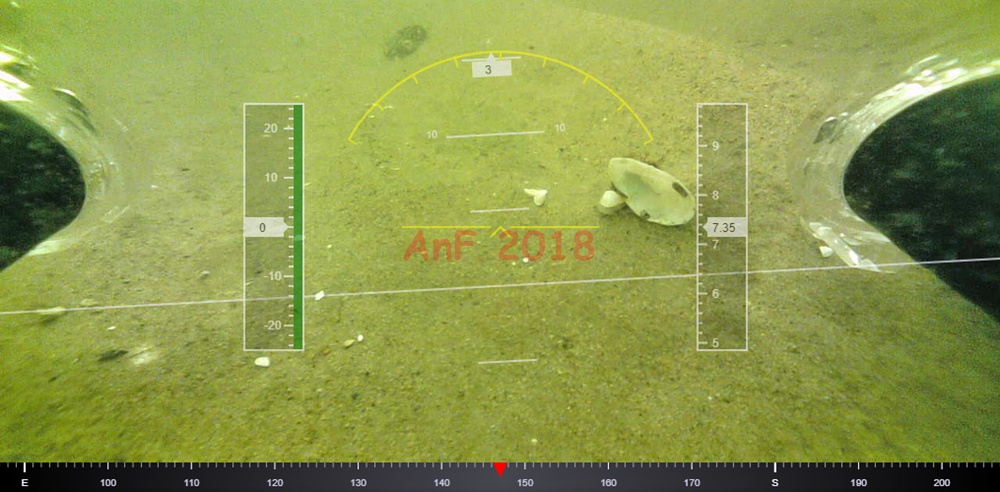
| Nicht nur im Hafen von Lubmin blieb Zeit für einen Tauchgang, auch auf der Ostsee vor Lubmin bot sich eine Pause während der Arbeit an. Bei Wassertiefen von über 7m, bestem Wetter und klarer Sicht hat die Erkundung des Seebodens meinen Kollegen und mir viel Spaß gemacht. Sogar eine Rolle auf dem Wasser war möglich ... | |
|
OpenROV Gallerie öffnen |



|
| 18.Mai 2018, Ostsee, Hafen Lubmin | |
|
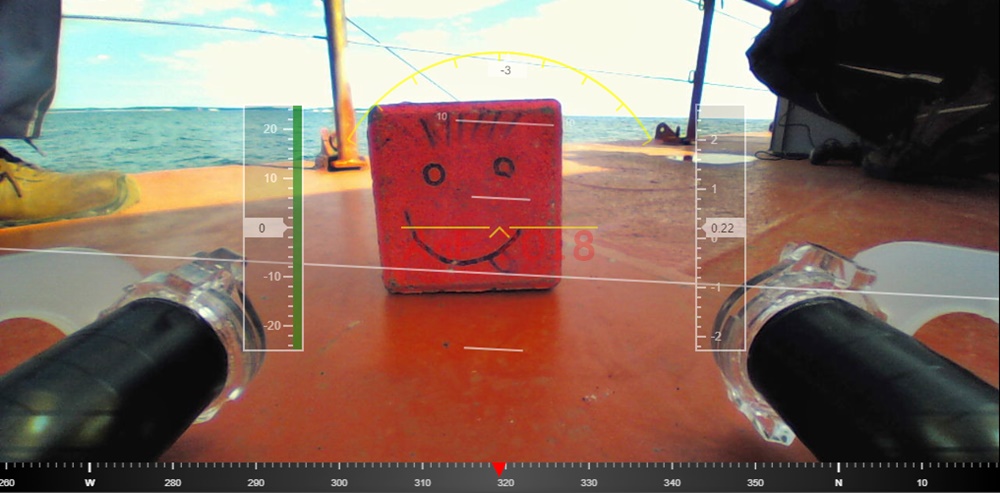
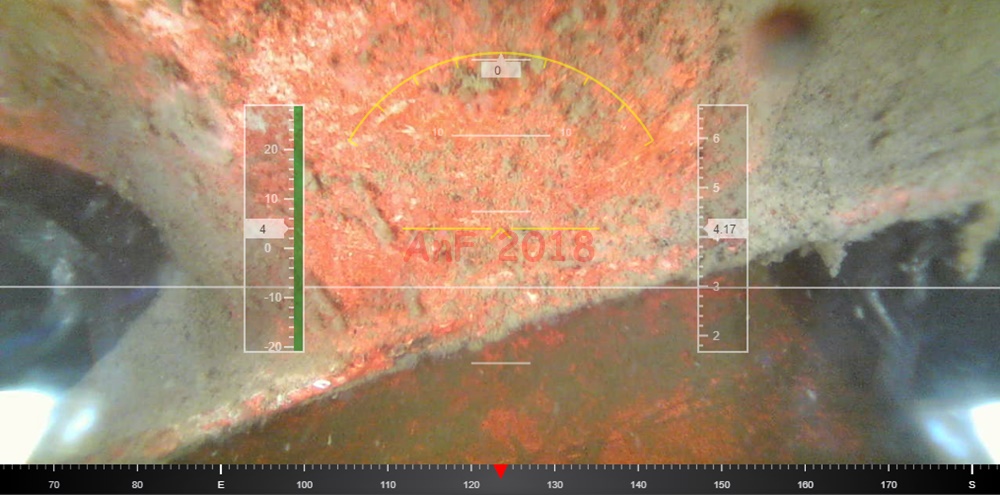
Da ich hier beruflich zu tun hatte (ebenfalls mit einem ROV), habe ich die Gelegenheit genutzt
und mein eigenes kleines ROV mitgebracht. Nach Feierabend fand dann der erste Test im Hafen statt.
Zufällig wurden hier zwei Container im Hafenbenken versenkt, vorgesehen als "wet storage", und bieten
damit ein interessantes Ziel. Erfahrungsgemäß sollte allerdings die Sicht sehr eingeschränkt sein.
Erst bei direktem Kontakt mit dem Ziel ist dieses gut zu erkennen, wie die Bilder zeigen. Hier zeigt sich bereits eine mögliche Optimierung: die Verbindung zwischen Kabel und ROV per Kabelbinder ist zu starr und behindert die Drehung des ROV. Auch der ursprünglich vorgesehene Rechner ist zu langsam für eine flüssige Darstellung und wird ausgetauscht. |
|
|
OpenROV Gallerie öffnen |





|
| 01.März 2018 | |
| Noch einige letzte Arbeiten bevor das Frühlingswetter hoffentlich bald einsetzen wird. Die Gewichte habe ich durch Muttern aus Edelstahl ersetzt, die nun beliebig angeordnet und variiert werden können (bei Bedarf kann sogar noch eine zusätzliche Querstange angebracht werden). Ein etwa 4m langes Sicherungsseil ist am Heck befestigt, so dass die Last beim Hochheben des ROVs nun nicht komplett auf dem Kabel lastet. Dazu noch eine passende Transportbox für das komplette System inkl. aller Kleinteile und Werkzeuge. | |
|
OpenROV Gallerie öffnen |




|
| 09.Dezember 2017 | |
|
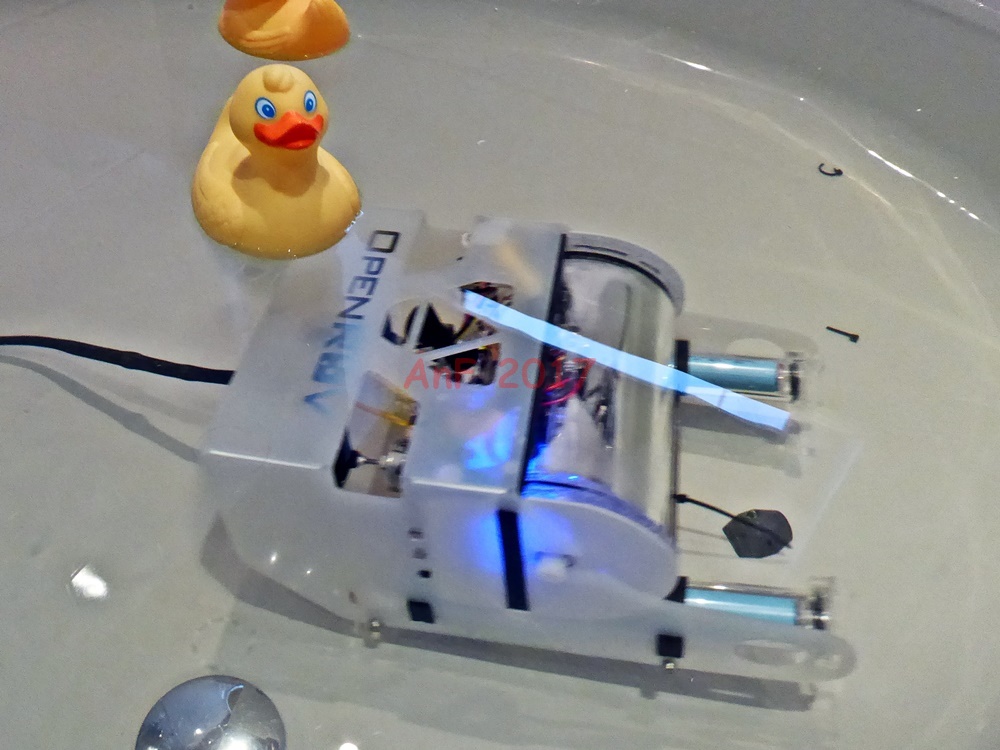
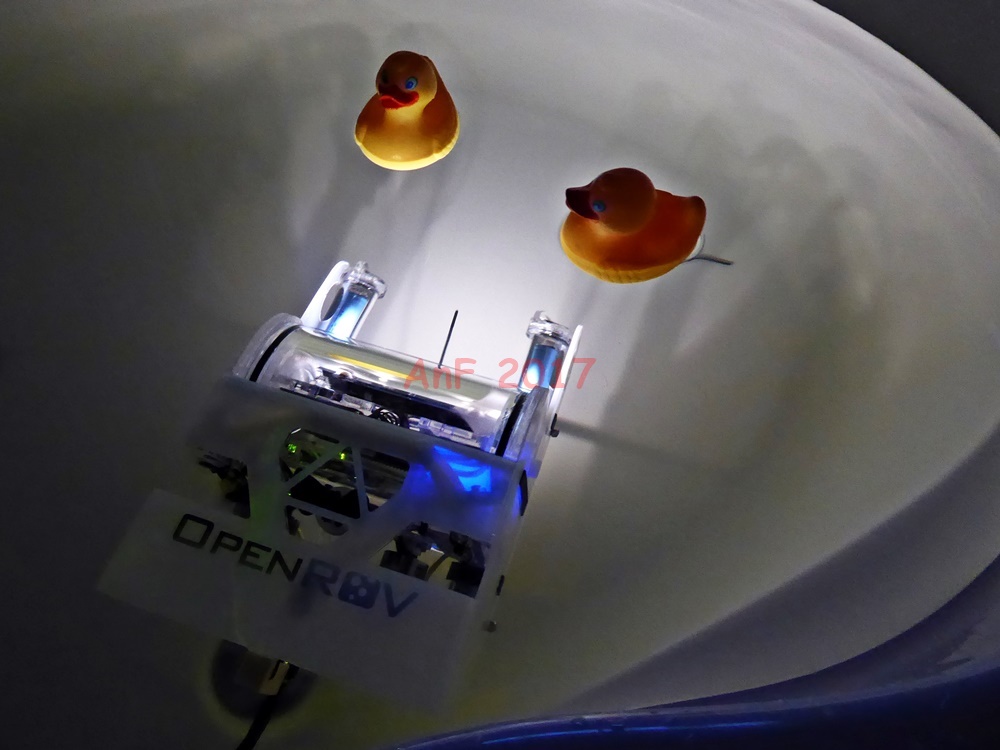
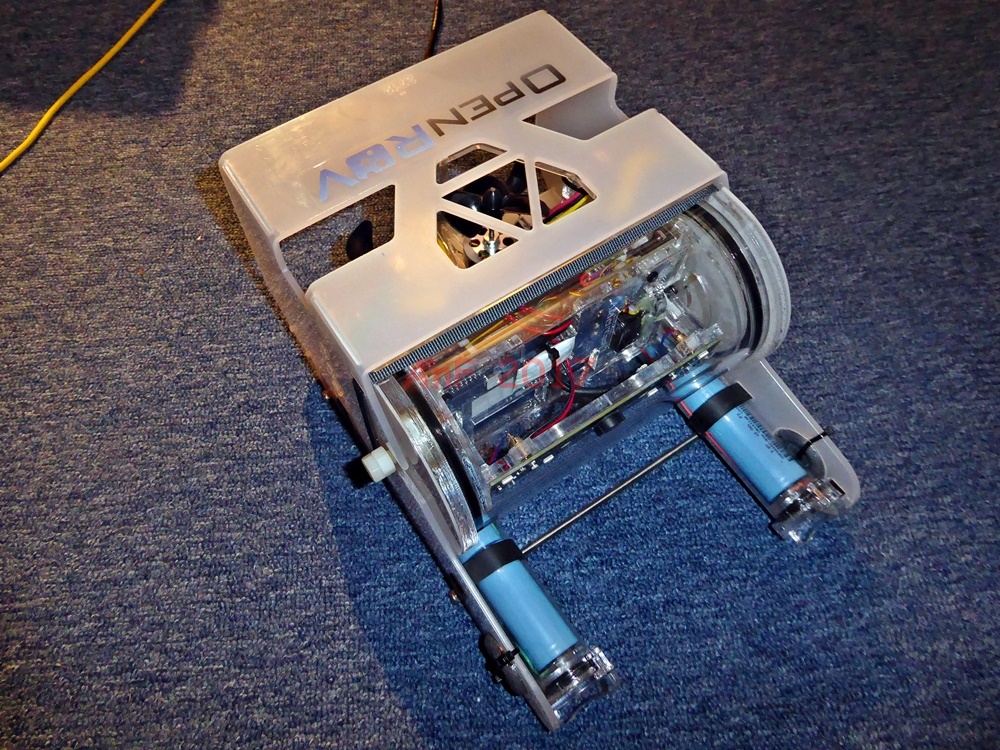
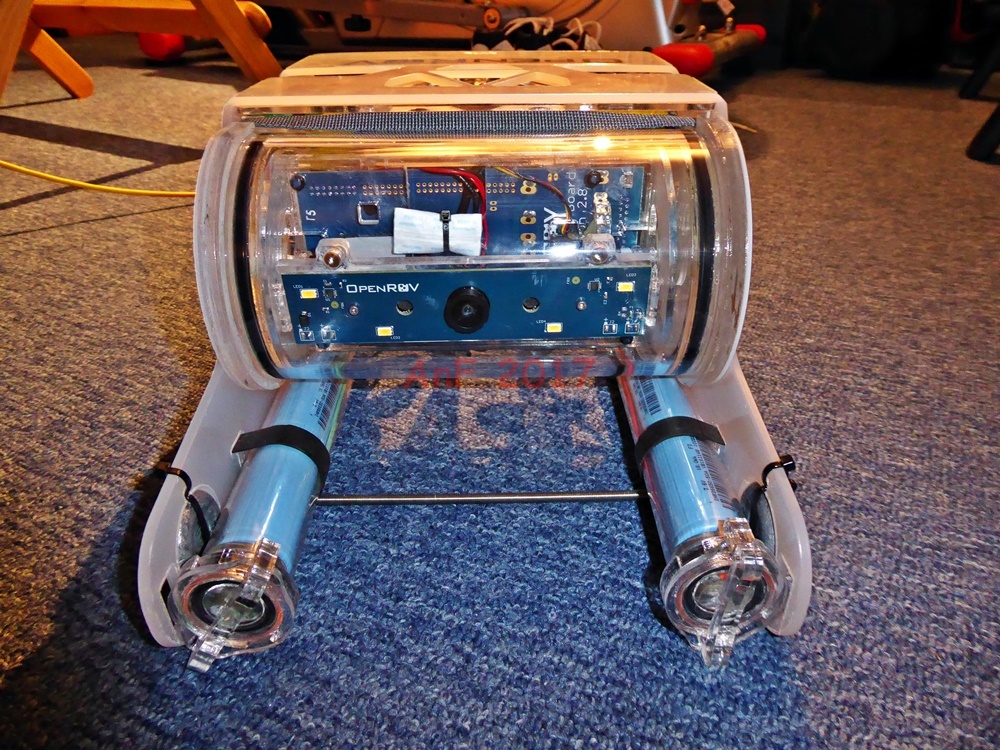
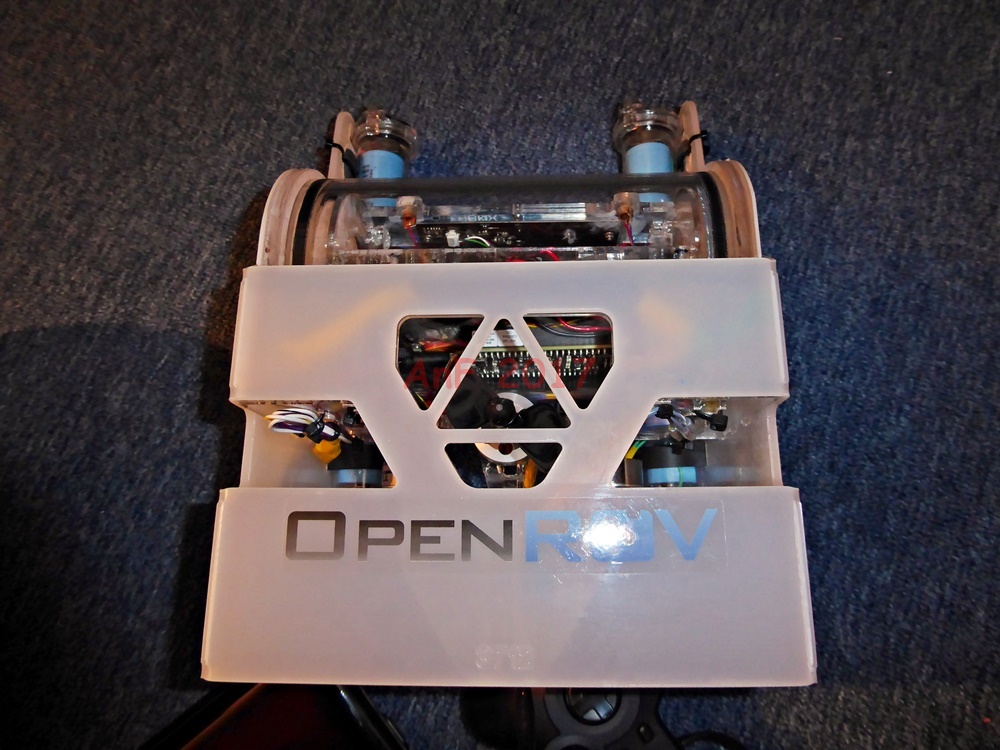
Der bereits seit längerem geplante WetTest sollte heute zeigen, ob die Röhren für die Elektronik und
Batterien dicht sind. Dazu reicht erstmal eine Badewanne und eiskaltes Wasser. Primär wollte ich sehen,
ob auch alles dicht bleibt wenn ein Unterdruck in den Röhren herrscht - und das Wasser in den Harzer Teichen
ist tatsächlich sehr kalt! Um das Ergebnis vorweg zu nehmen: WetTest PASSED. Auch nach ein paar Stunden gab es
noch keinen Wassereinbruch. Es war aber deutlich zu sehen, dass erwartungsgemäß die wärmere Luft in den Röhren an der
Innenseite kondensierte. Es bildeten sich aber keine Wassertropfen und auch die Elektronik hat keinen Schaden
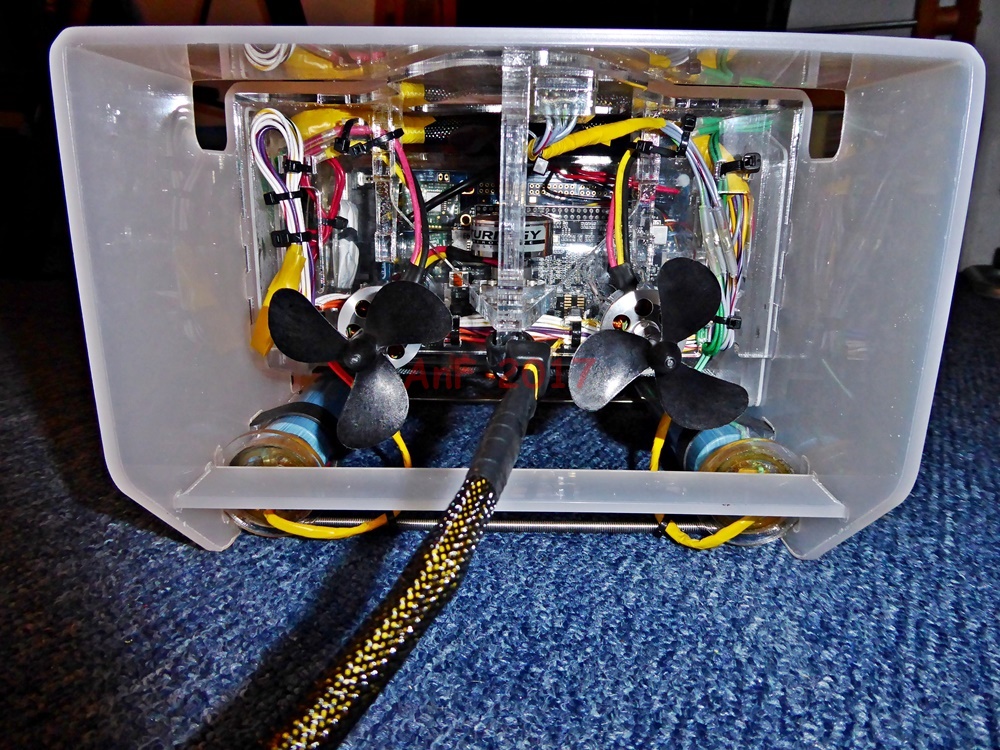
genommen. Ein weiterer Punkt war die Austarrierung des ROV, so dass dieses grundsätzlich knapp an/unter der Wasseroberfläche schwimmt. Etwa 100g zusätzliches Gewicht an der Front reichten bereits für eine fast perfekte Lage. Die Steuerung des ROV scheint ein wenig gewöhnungsbedürftig zu sein. Dies liegt nicht zuletzt daran, dass nur insgesamt 3 Motoren zur Verfügung stehen. Beispielsweise ist so eine Drehung des ROV's auch immer mit einer leichten Vorwärtsbewegung verbunden, da beide verantwortlichen Motoren am Heck sitzen. Auch die Übermittlung der Befehle nimmt etwa eine Zehntelsekunde in Anspruch - eine Verzögerung, mit der man rechnen muss und die man bei der Übermittlung des Videobildes auch sieht. Leider zeigte sich auch, dass ich den Bildschirm nicht effektiv aufzeichnen kann. Die damit verbundene Auslastung des Rechners verursacht eine weitere Verzögerung in der Steuerung - aber automatisch gespeicherte Screenshots sollten auch reichen. Der erste reelle Einsatz wird zeigen, wie exakt die Steuerung ist - verspricht also, sehr interessant zu werden. Aufgrund des derzeitigen Wintereinbruchs werde ich damit aber noch ein wenig warten ... |
|
|
OpenROV Gallerie öffnen |
|
| 25.November 2017 | |
|
Die kleine Pause seit meinem letzten Eintrag resultiert aus einer Änderung in der Steuerung des ROV Systems.
Es hat sich gezeigt, dass die Befehls- und Datenübermittlung per WLan teilweise eine Verzögerung von bis zu
1s aufwies (die ROV Software bietet eine entsprechende Anzeige und man konnte es auch deutlich "fühlen").
Die Verbindung per Netzwerkkabel liefert dagegen nur eine Verzögerung von etwa 100ms. Also werde ich das System
per Netzwerkkabel betreiben - das TMS ist dennoch sinnvoll, da es einen Kabelsalat verhindert. Darüberhinaus war noch ein Steuerungsrechner (momentan ein Netbook mit langer Laufzeit und ein Gamepad) notwendig. Die Idee, das System per Android Tablet zu betreiben, konnte ich leider aufgrund graphischer Probleme (noch) nicht umsetzen. |
|
|
OpenROV Gallerie öffnen |


|
| 08.Oktober 2017 | |
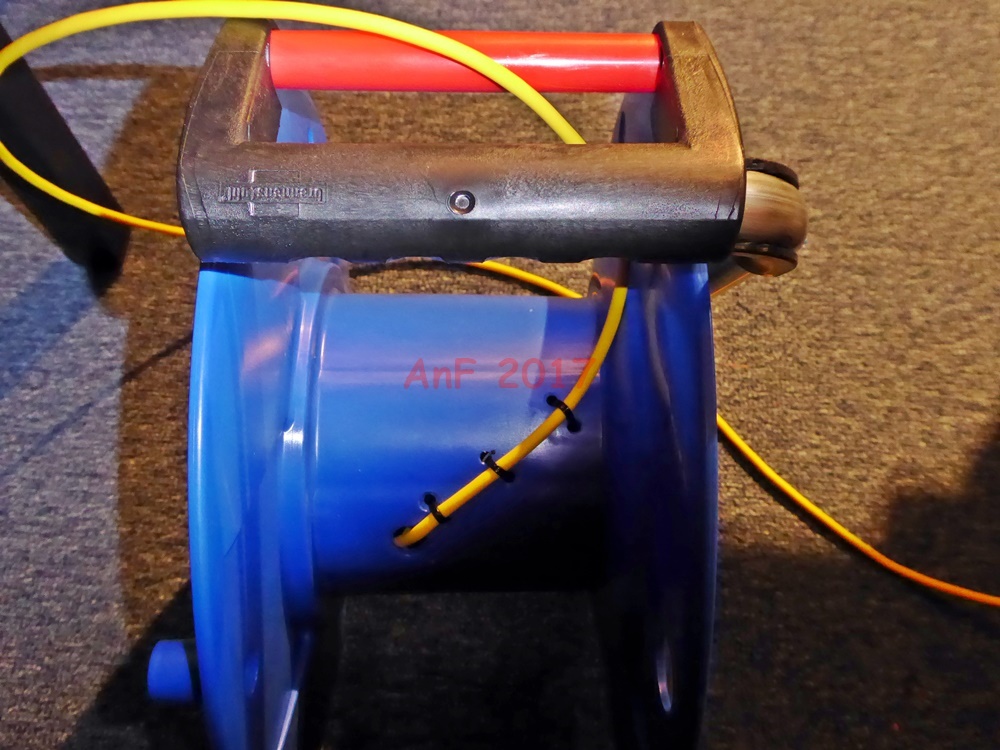
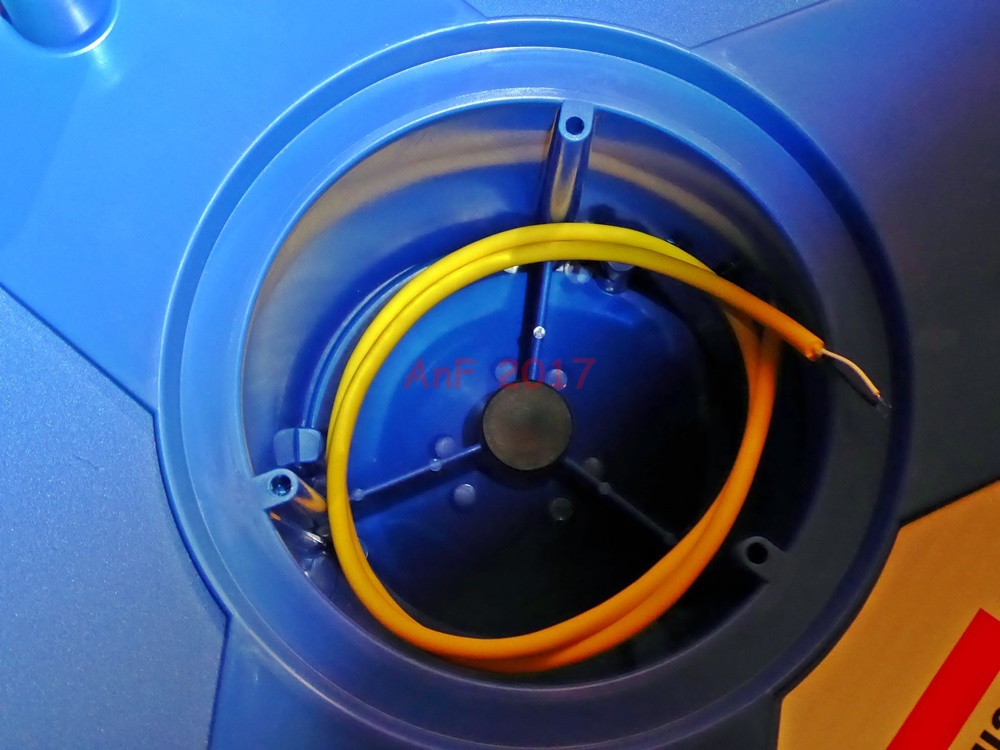
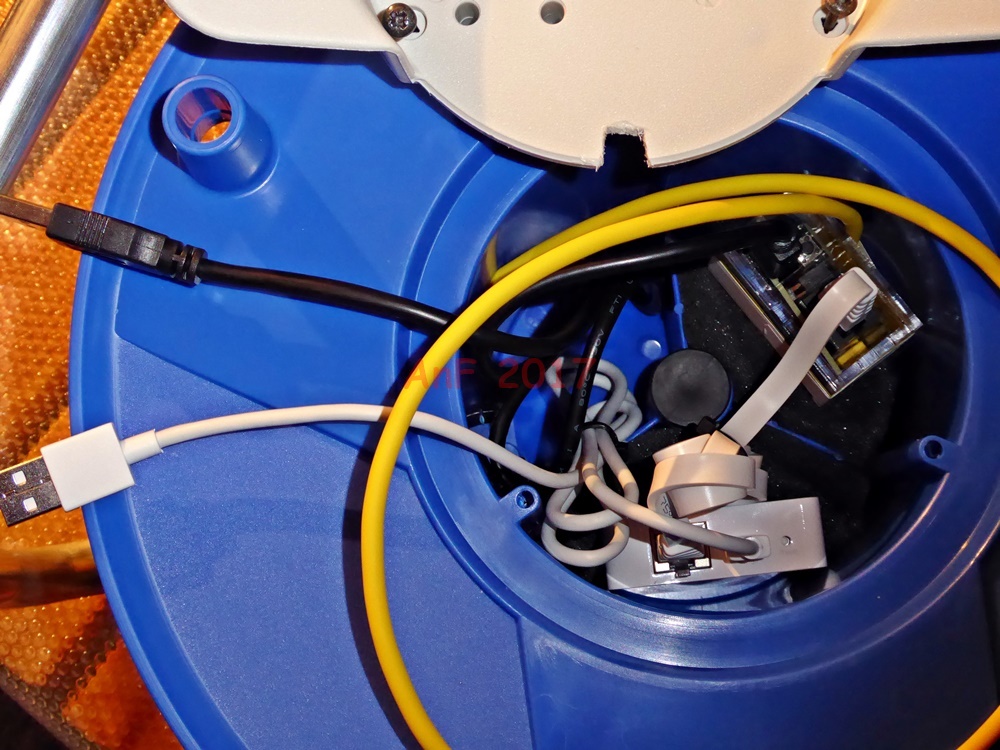
| Ein durchdachtes Tether Management System (TMS) vereinfacht den Einsatz dieses ROV und vermeidet sicher auch den einen oder anderen Knoten im Umbilical. Entscheidend ist, dass sich die Verbindung zum Rechner nicht mitdrehen kann. Also entweder einen Schleifring verwenden oder eine drahtlose Verbindung einrichten. Für Letzteres reicht eine leere Kabeltrommel, idealerweise mit einem Hohlraum um die Achse, und ein WLan Router. Ein externer Akku liefert die benötigte Energie. | |
|
OpenROV Gallerie öffnen |


|
| 24.September 2017 | |
| Jetzt wird sich zeigen, ob ich korrekt gearbeitet habe oder mich ärgern werde: Einschalten und Funktionstest - PASSED! Nun kann ich alles zusammenstecken, die Dichtungen einsetzen und verschliessen. | |
|
OpenROV Gallerie öffnen |
|
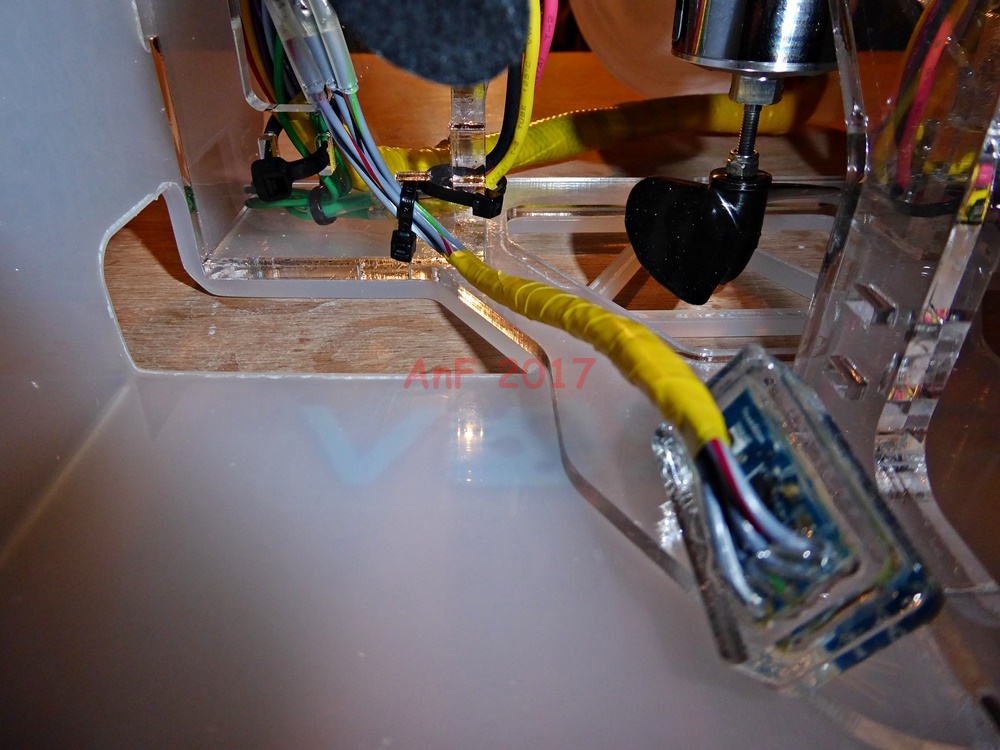
| 21.September 2017 | |
| Soweit sind nun alle Teile und Verbindungen zusammengebaut. Das Ganze wird nun im Rahmen des ROV's eingebaut, die Kabel alle sicher fixiert und natürlich auch noch das Umbilical angeschlossen. Den IMU Sensor werde ich besser noch nicht verkleben bevor ich ihn nicht getestet habe. Sollte jetzt eine Kabelverbindung nicht in Ordnung sein, wäre das natürlich ärgerlich ... | |
|
OpenROV Gallerie öffnen |


|
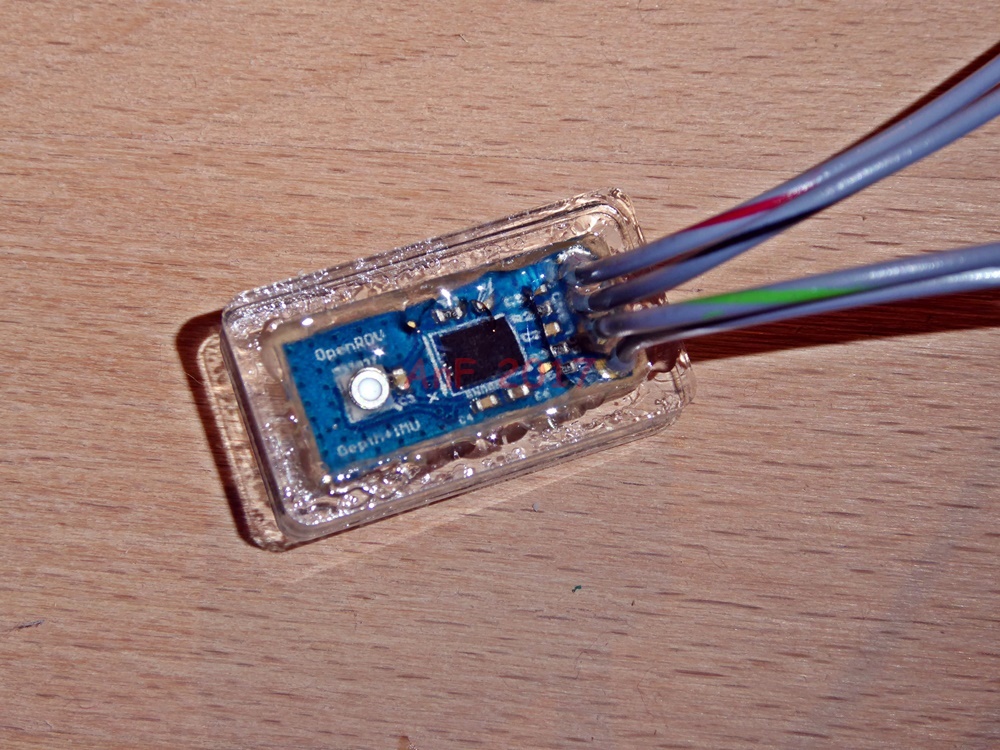
| 19.September 2017 | |
| Solange, wie die anderen Teile noch trocknen müssen, kann schon mal der IMU Sensor vorbereitet werden. Dieser liefert später das magnetische Heading sowie die Wassertiefe (per Drucksensor). Der Sensor ist wasserdicht mit Epoxidharz vergossen - lediglich der Kopf des Drucksensors sollte dabei besser nicht mit Harz bedeckt werden ;-) | |
|
OpenROV Gallerie öffnen |
|
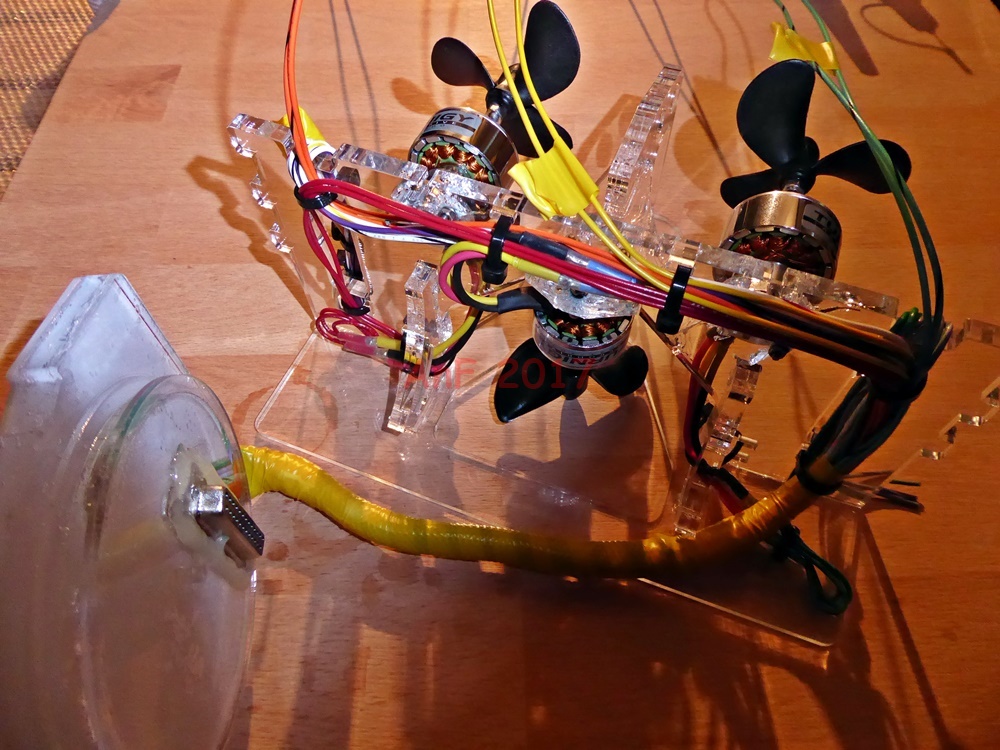
| 18.September 2017 | |
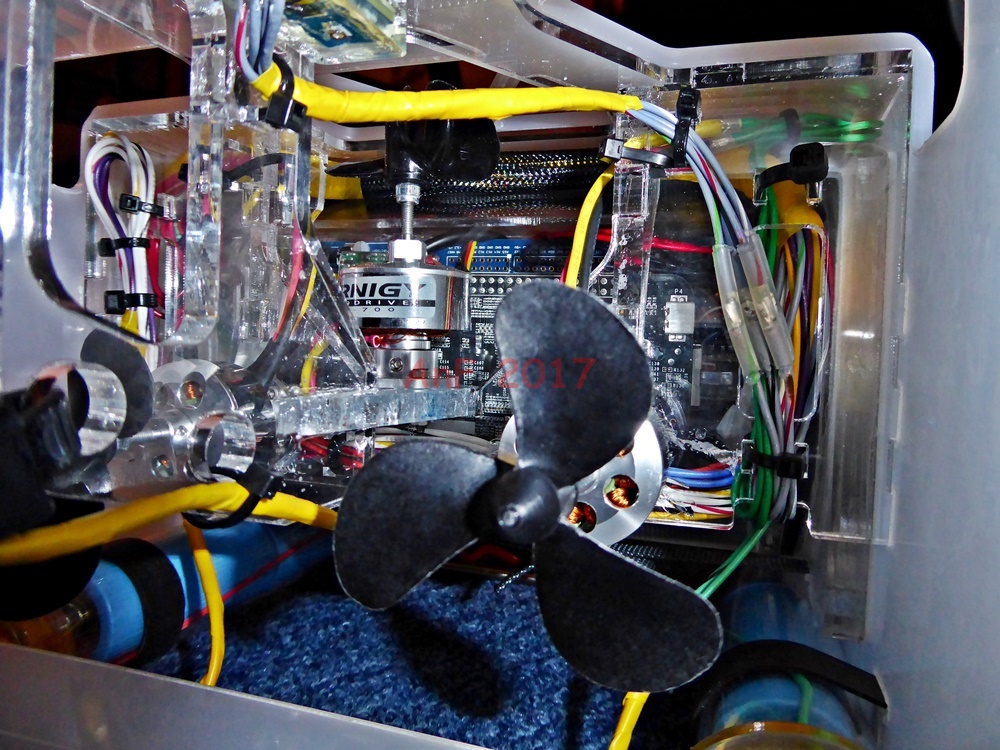
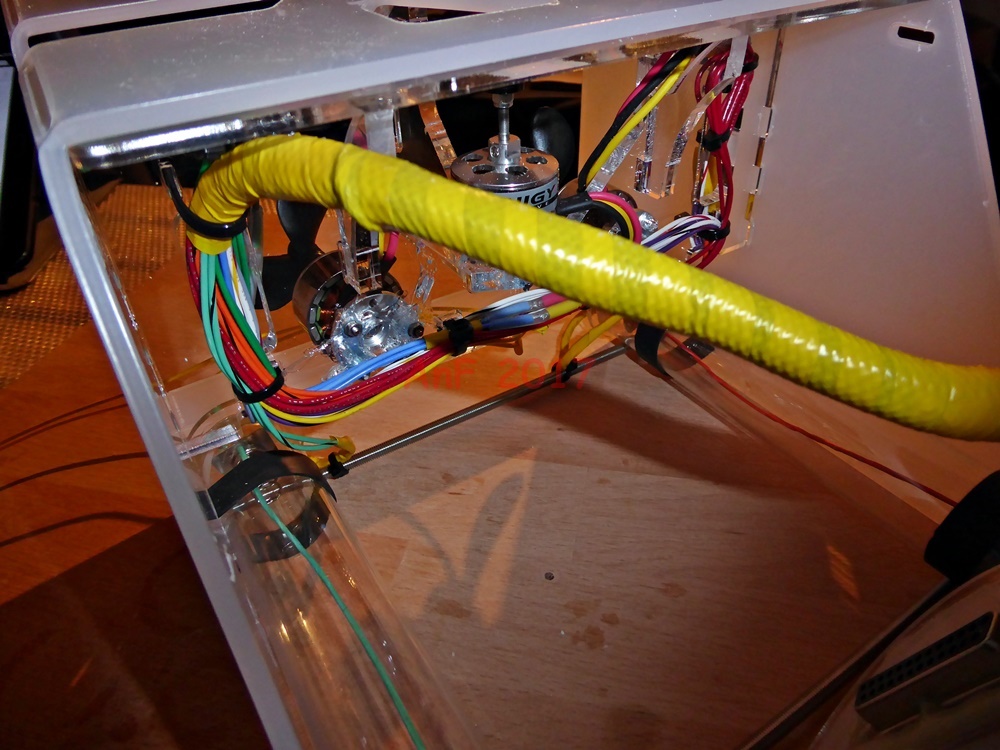
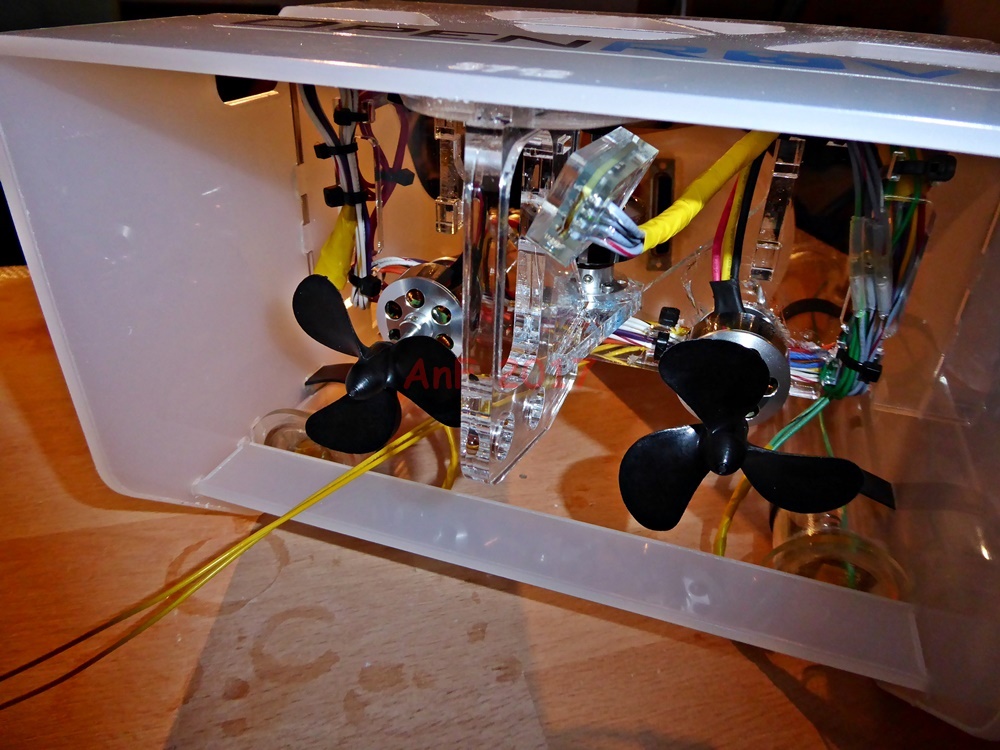
| In diesem Schritt wird die Verdrahtung des Systems in Angriff genommen - also das ganze Bündel an Drähten muss sortiert, gelötet, geschrumpft und am Rahmen gesichert werden. Im Wesentlichen werden dabei die 3 Motoren installiert und angeschlossen, sowie die Batteriegehäuse verbunden. All dies muss natürlich wasserdicht sein - mit Epoxidharz und speziellen Schrumpfschläuchen aber kein Problem. Lediglich das Fixieren der einzelnen Kabel ist recht zeitintensiv ... | |
|
OpenROV Gallerie öffnen |




|
| 14.September 2017 | |
|
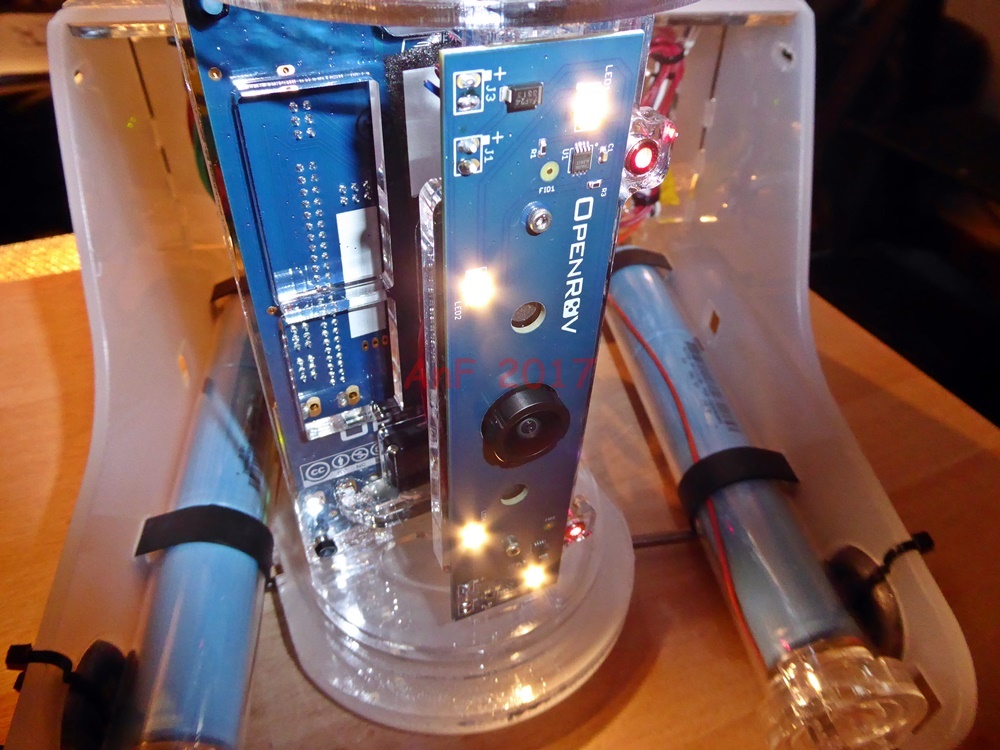
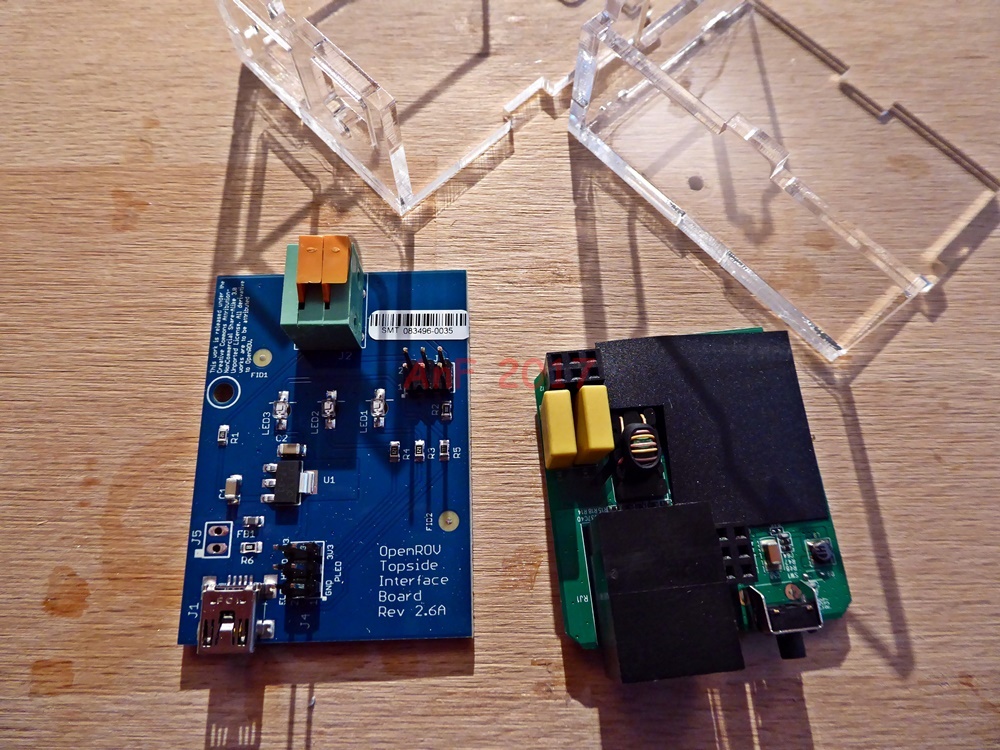
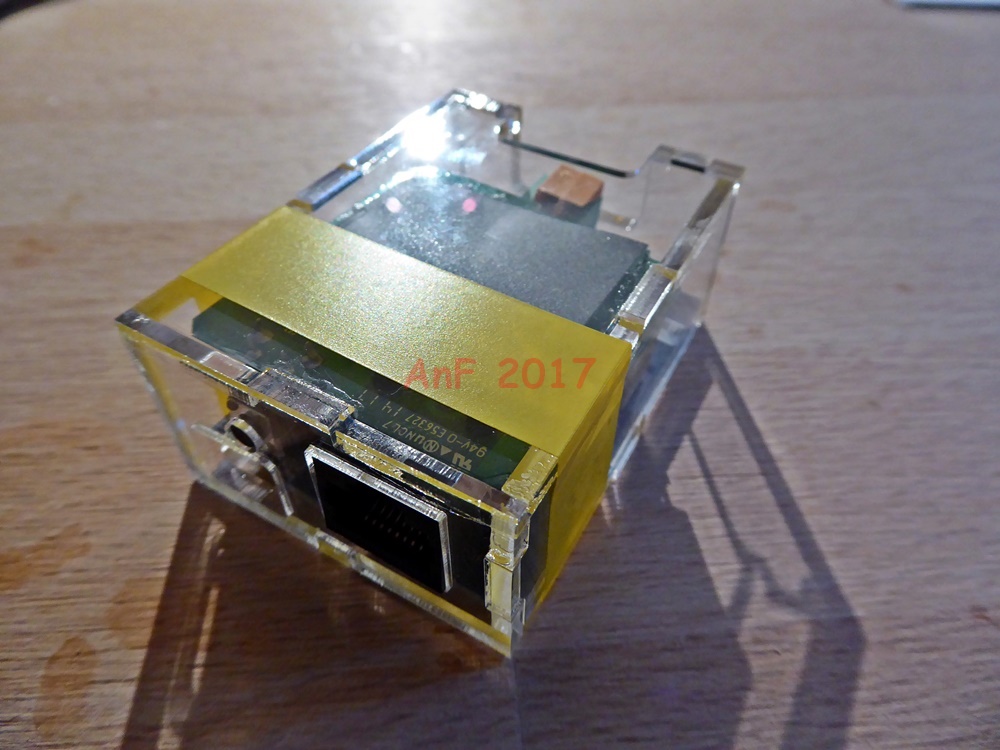
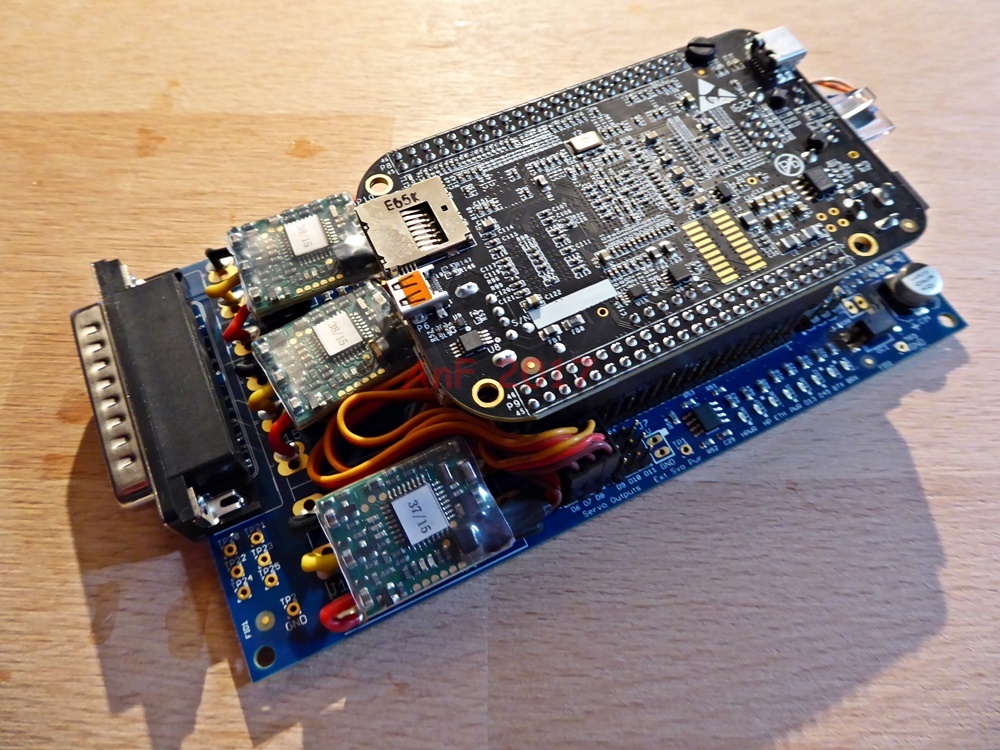
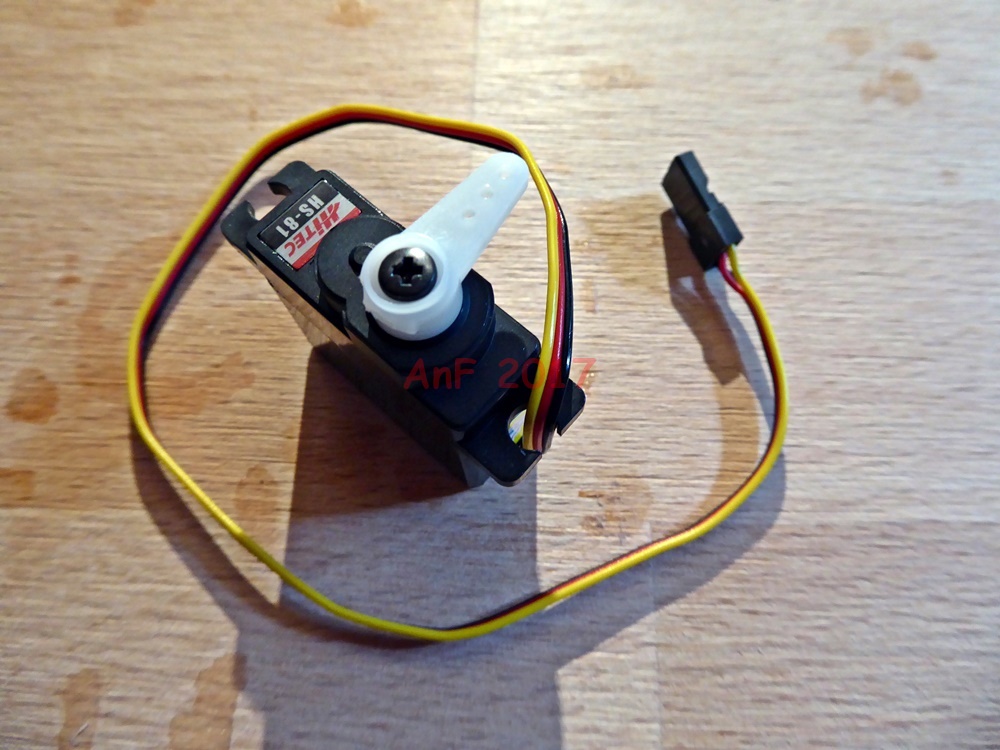
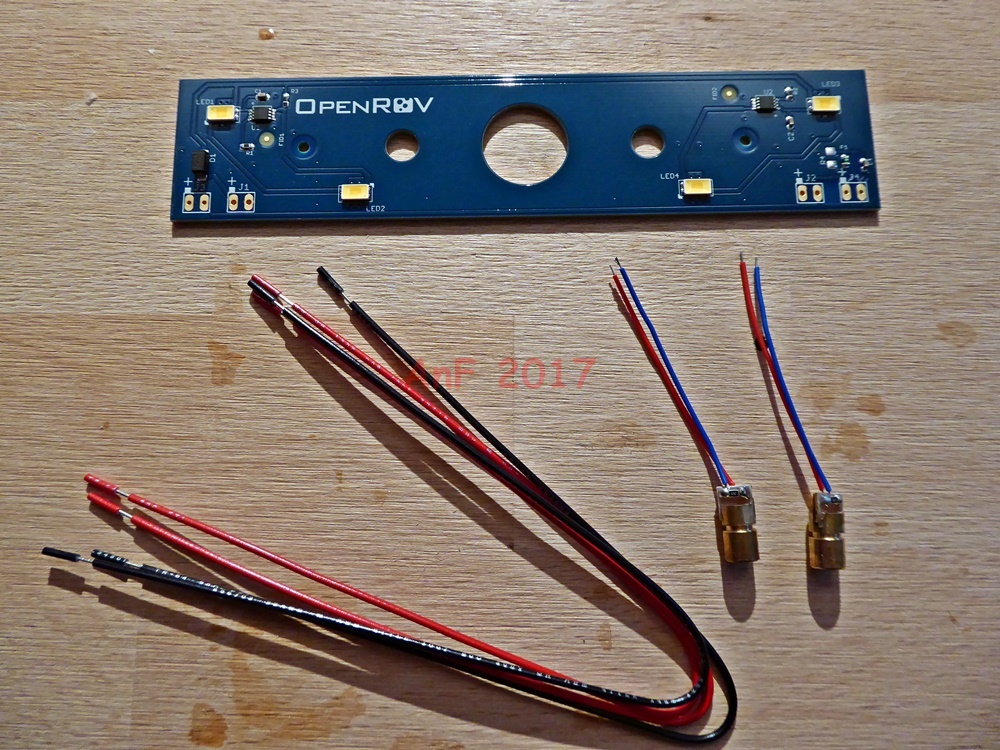
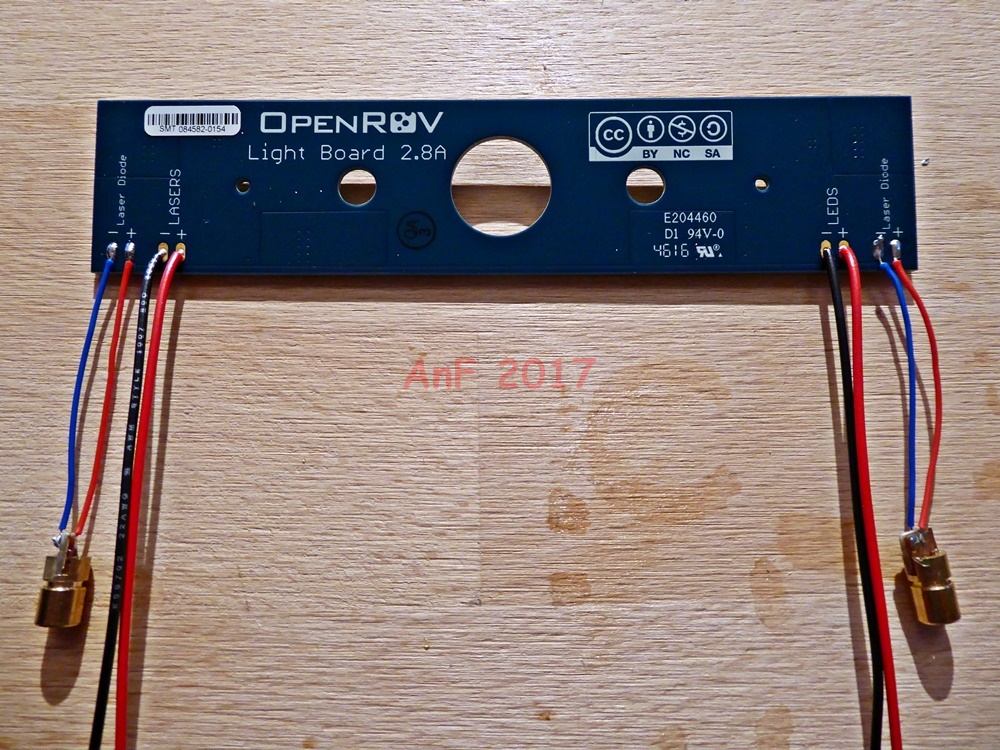
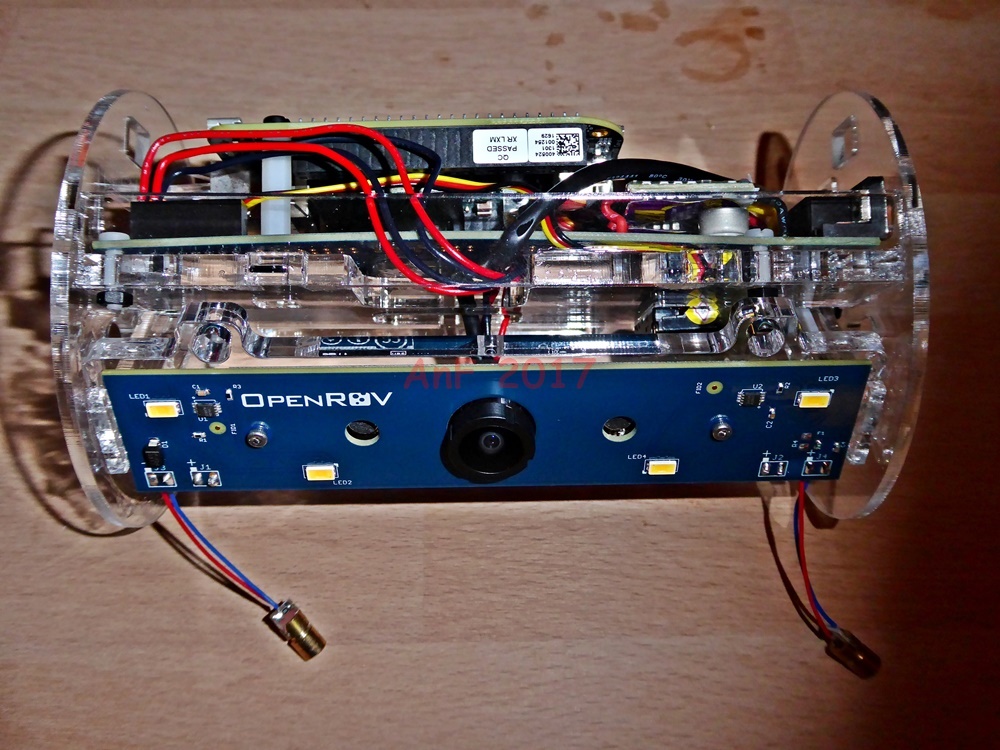
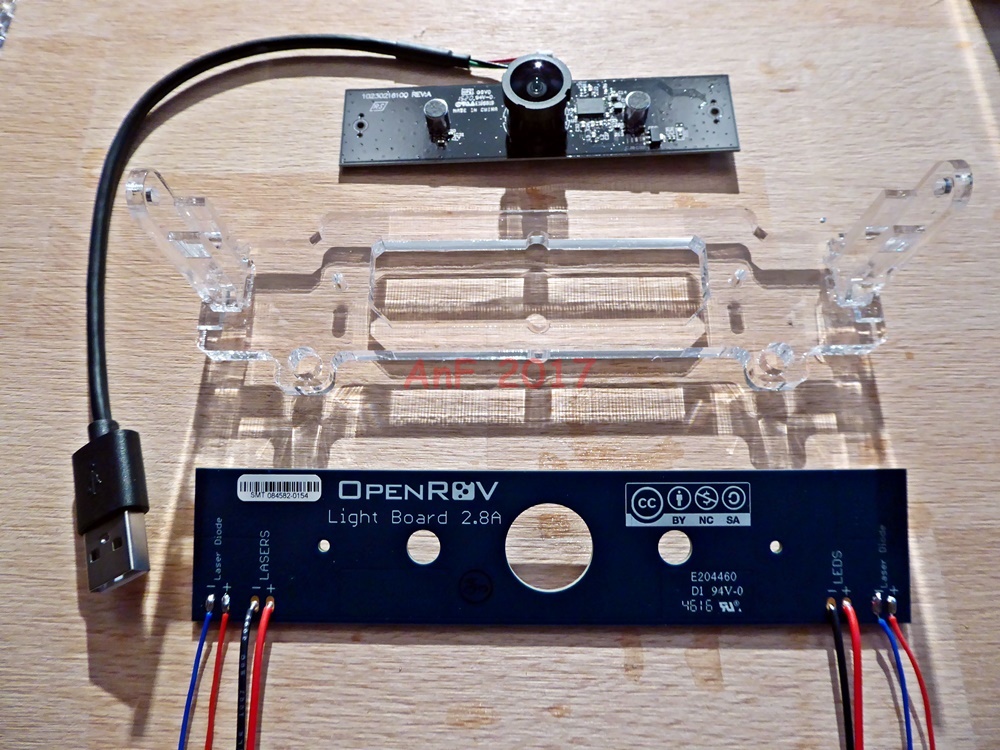
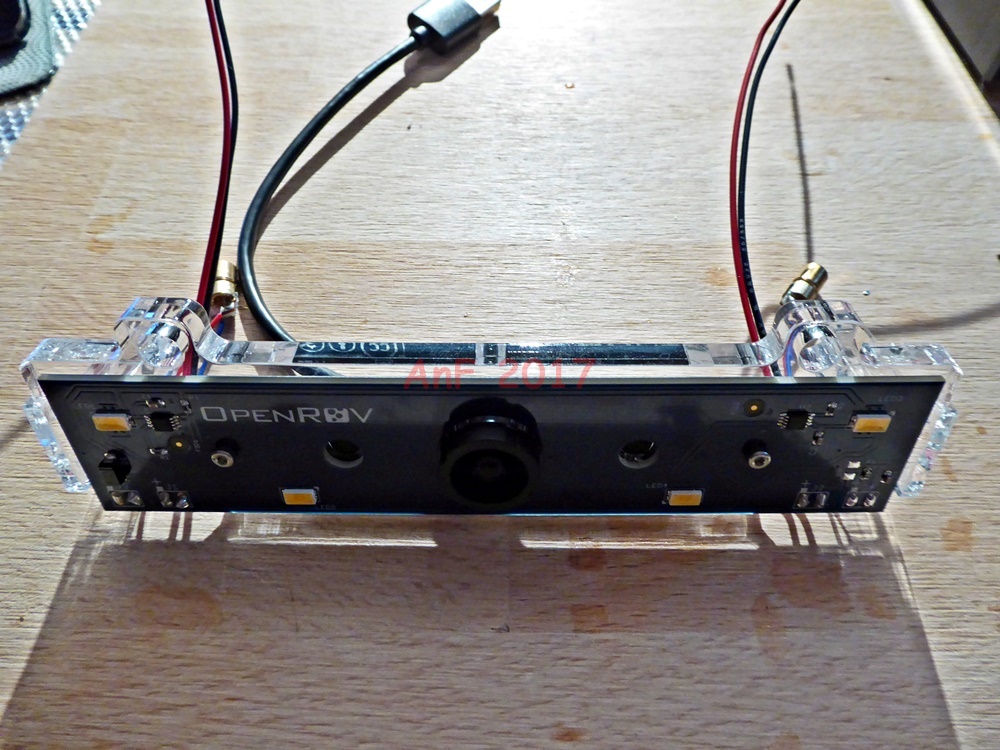
Nun wird endlich die Elektronik zusammengesetzt. Zum Teil werden dafür Komponenten aus handelsüblichen Geräten
ausgebaut (wie z.B. ein Powerline-Netzwerk-Adapter oder die Kamera) oder vorgefertigte Elemente (wie z.B. ein
Beaglebone PC) verwendet. Die bereits fertigen Acrylelelemente dienen dabei als Stütze/Gehäuse. Bei der Kamera zeigt sich, dass auch bei einem fertigen Bausatz "gebastelt" werden muss. Das Kameraelement ist drehbar gelagert und wird durch einen Servo bewegt. Die Drehachse wird durch zwei Plastikschrauben gebildet - dabei ist eine Schraube recht kurz gehalten und damit instabil. Eine neue Anordnung/Fixierung dieser Elemente scheint Abhilfe zu schaffen und sich hoffentlich auch in der Praxis bewähren ... |
|
|
OpenROV Gallerie öffnen |




|
| 12.September 2017 | |
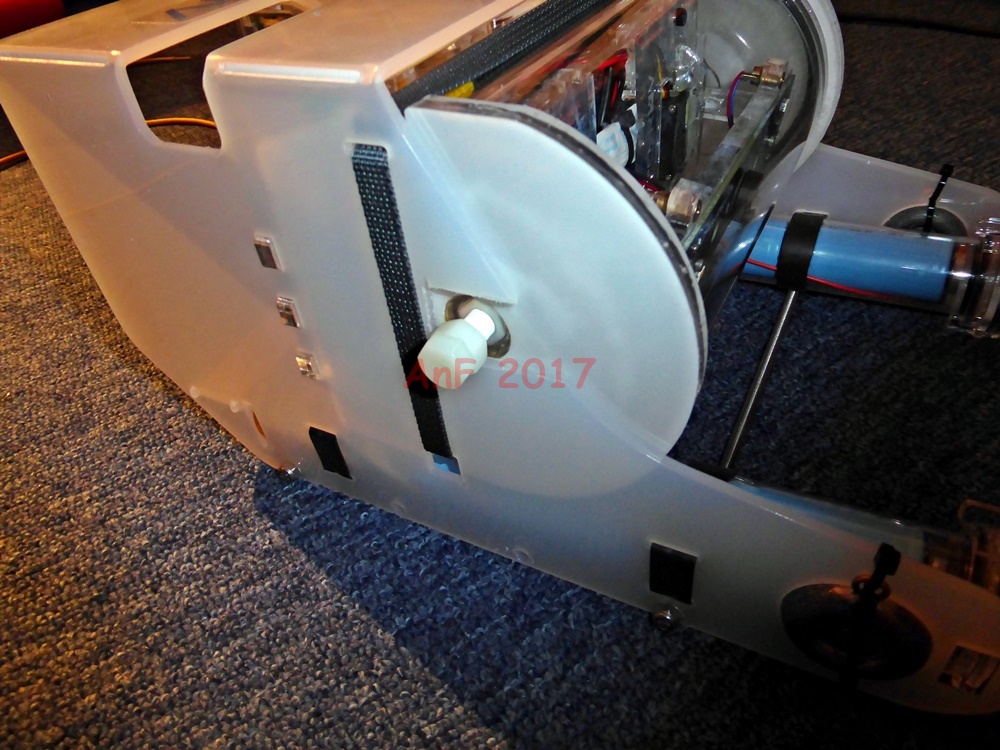
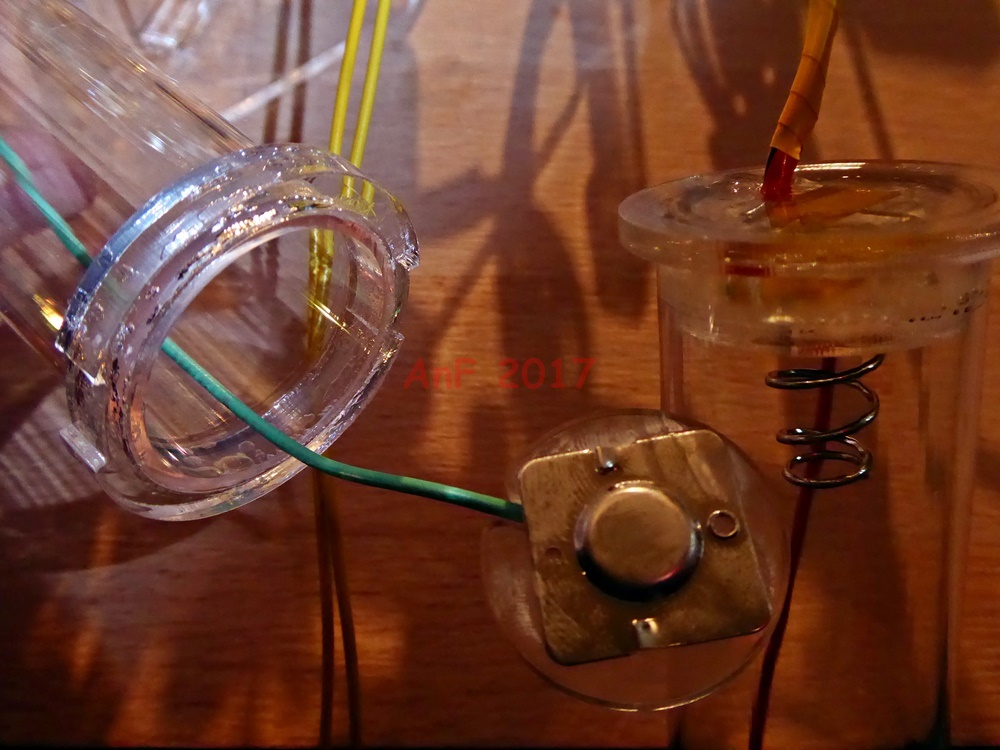
| In diesem Schritt werden die Endkappen des Gehäuses für die Elektronik zusammengesetzt. Dabei zeigen sich zwei Herausforderungen: auf einer Seite muss ein Kabel wasserdicht durchgeführt werden und die andere Seite benötigt ein "Überdruckventil", um beim Zusammenbau einen Druckausgleich zu gewährleisten. Ersteres ist durch Epoxidharz machbar, Zweiteres werde ich durch eine Plastikschraube mit, an der Enkappe fixierter Mutter und Dichtungsband/Silikonfett realisieren. Für die geringen Wassertiefen, in denen dieses ROV operieren wird, sollte diese Konstruktion ausreichen. | |
|
OpenROV Gallerie öffnen |


|
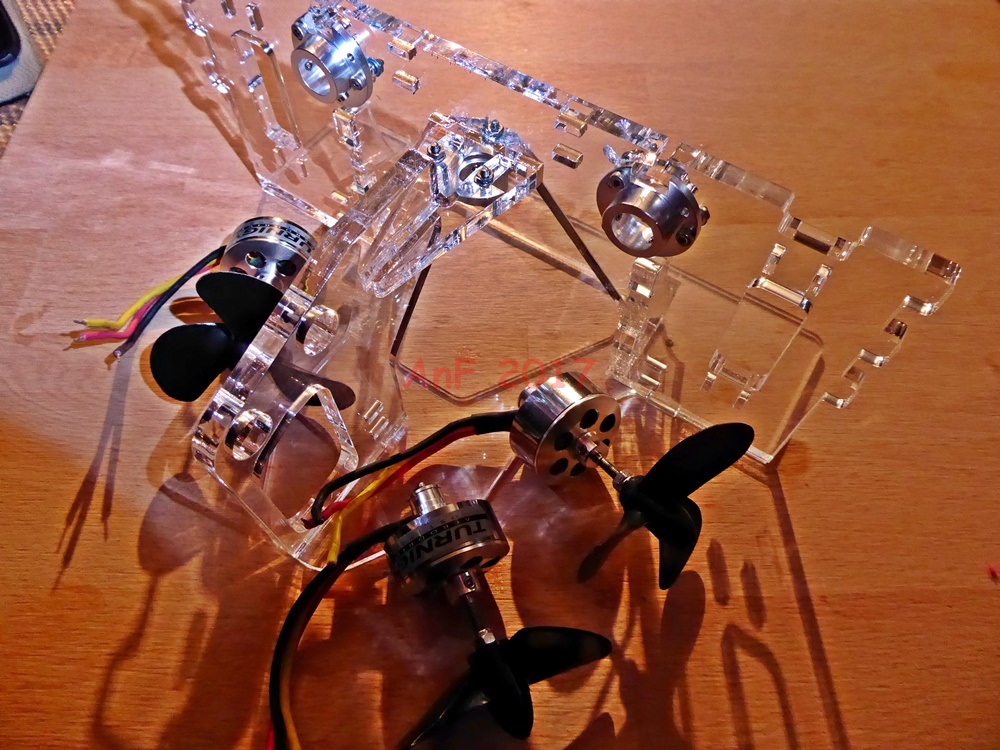
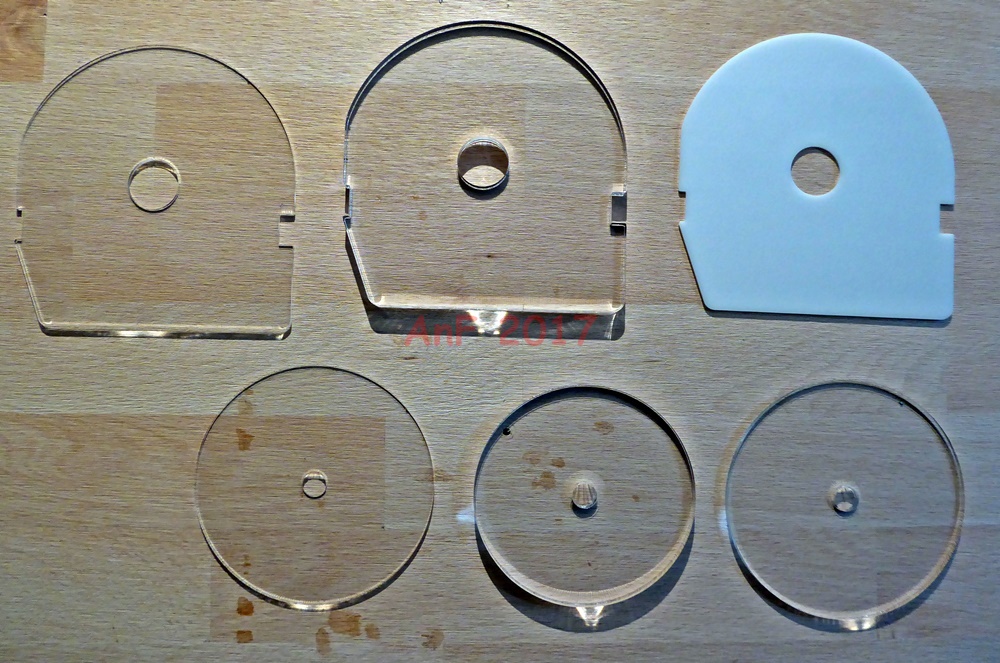
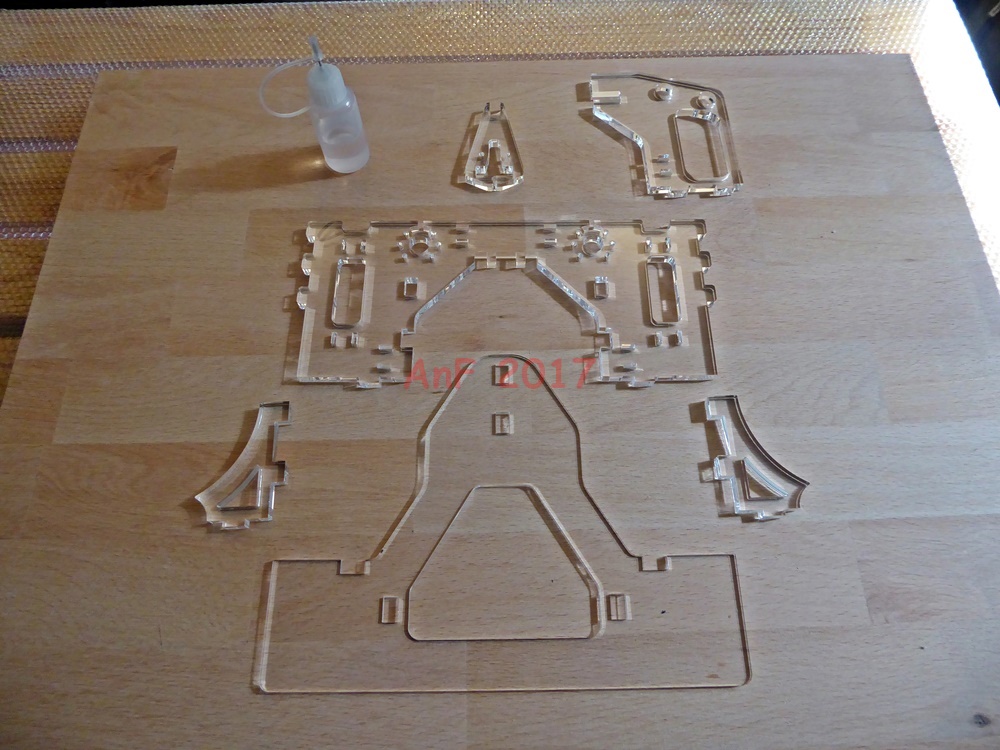
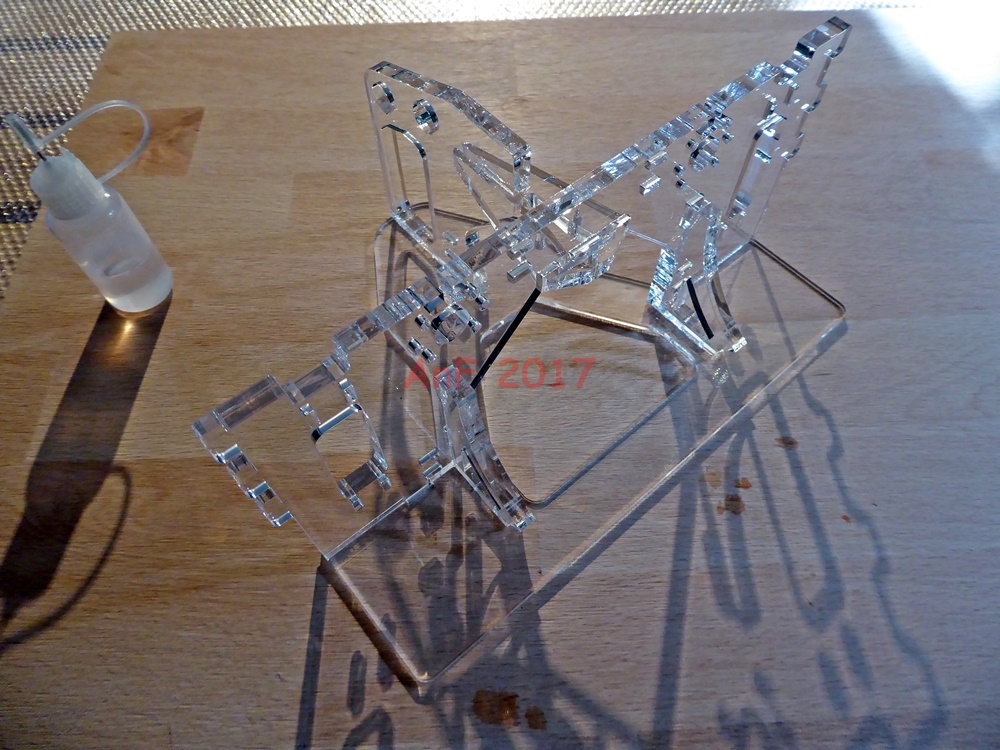
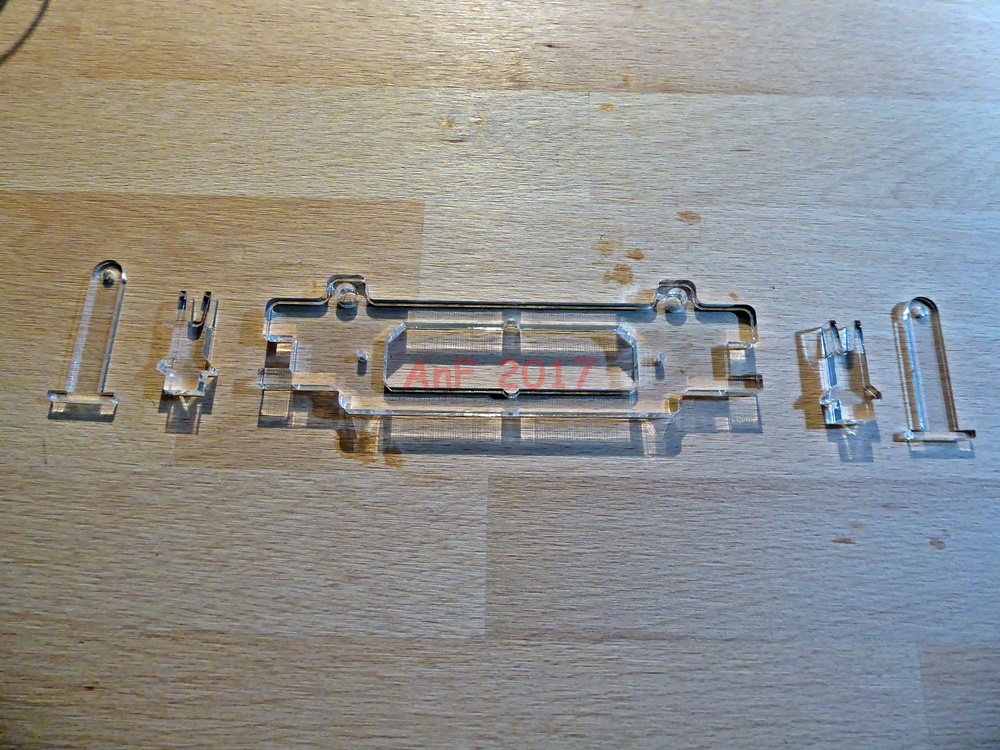
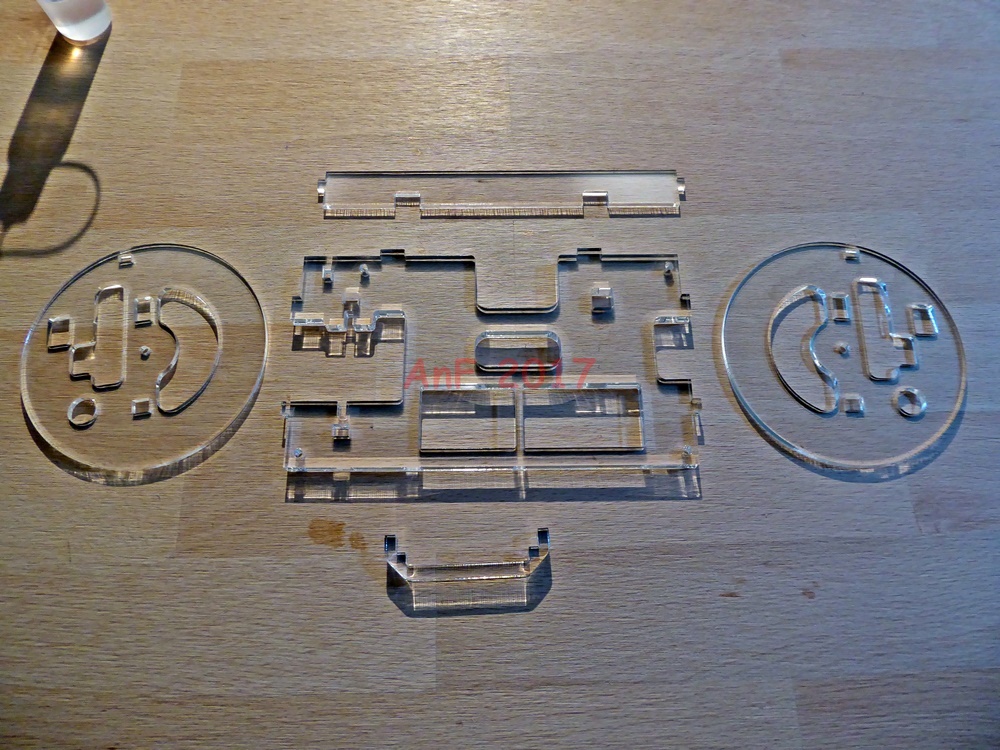
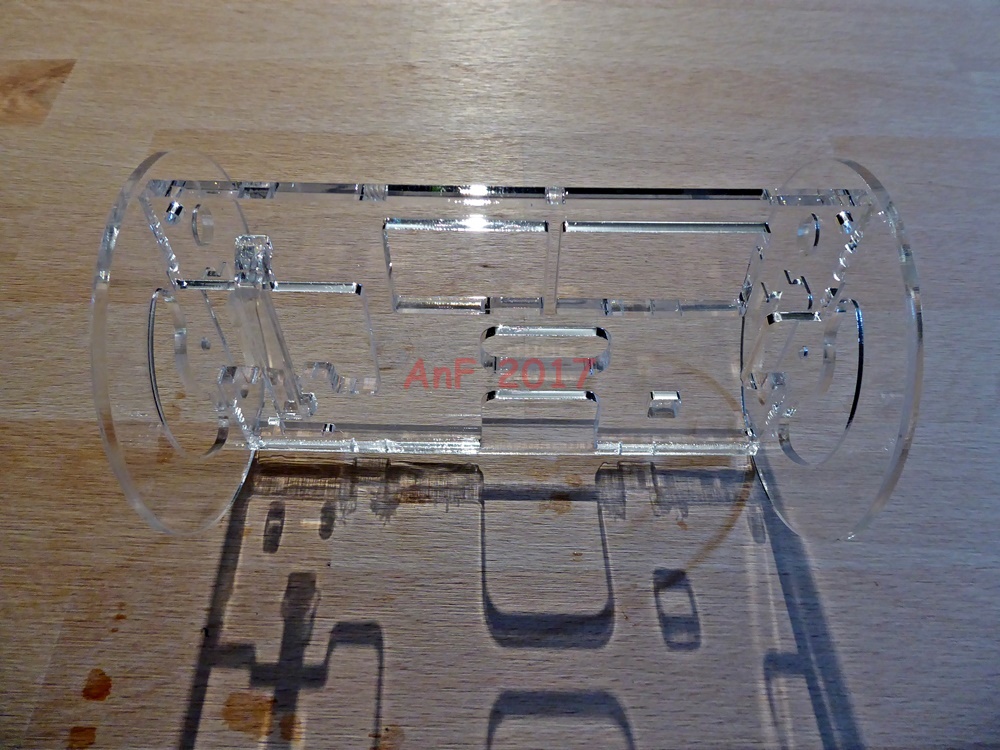
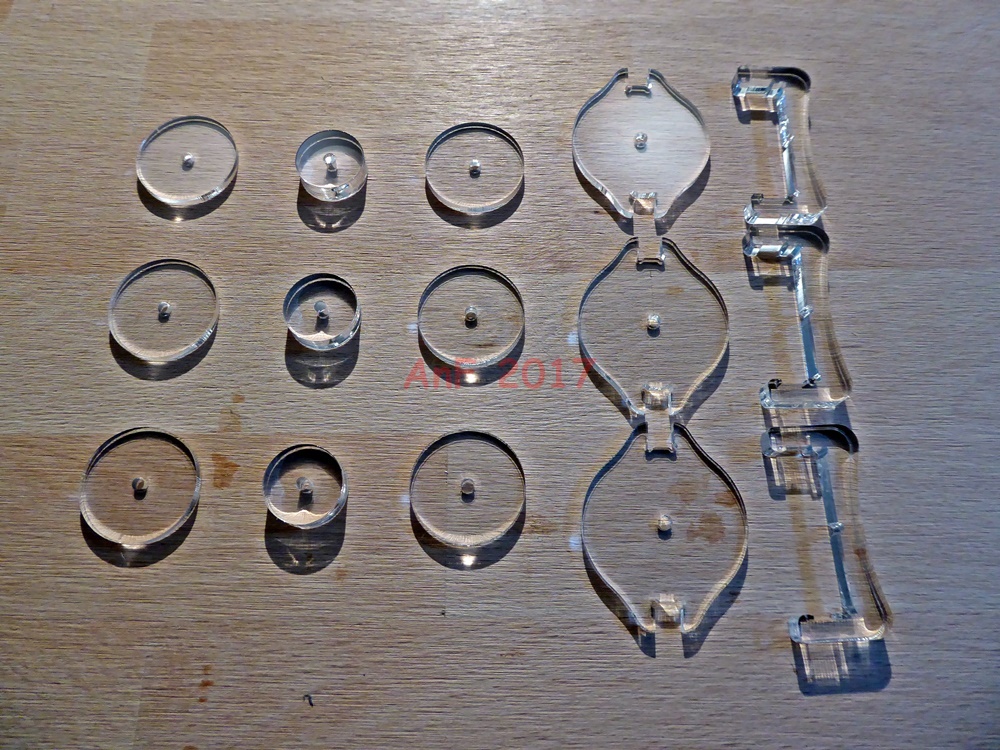
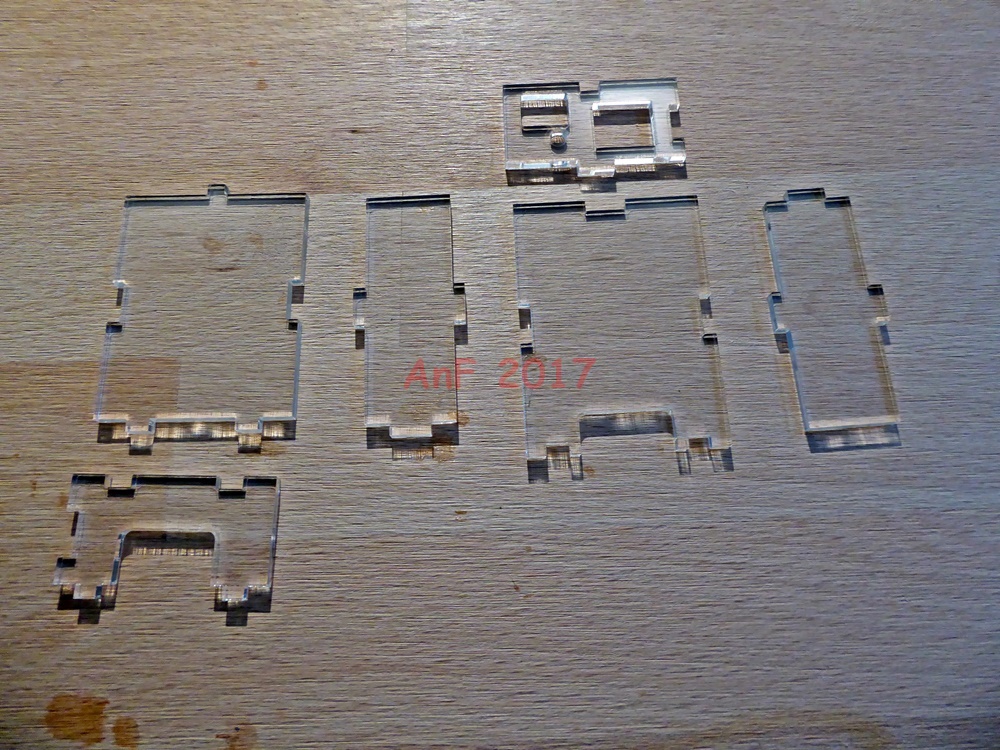
| 04.September 2017 | |
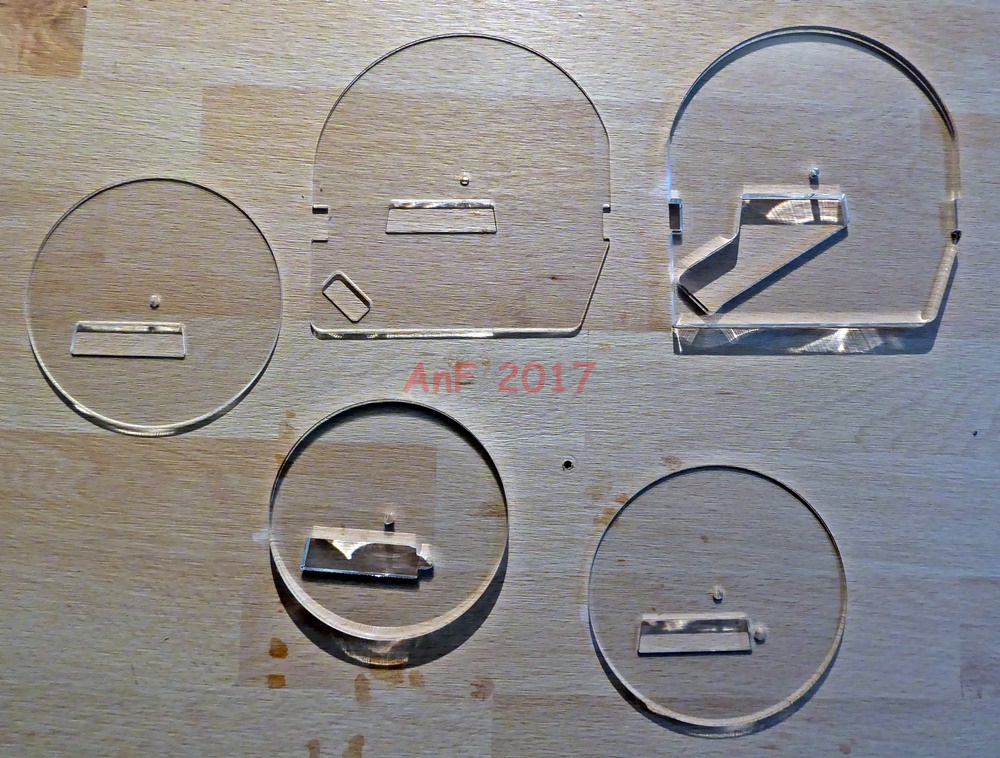
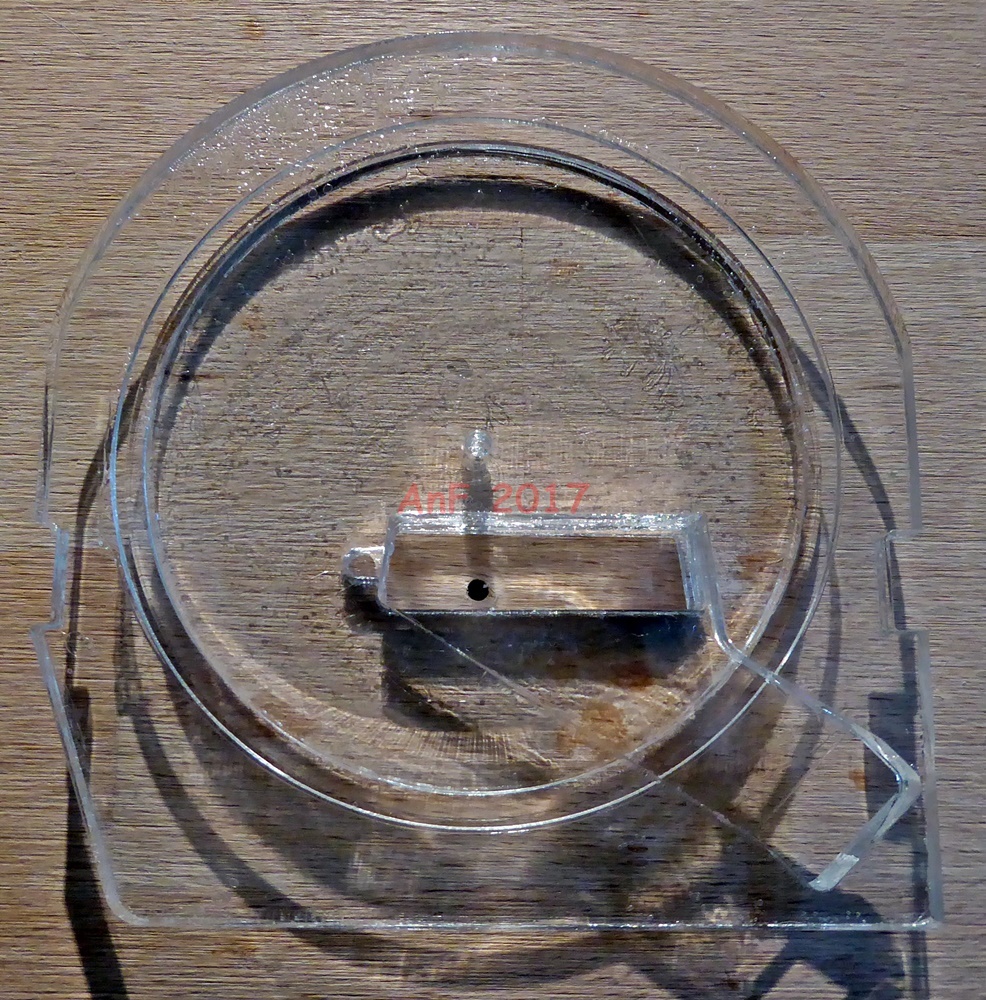
| Die Hauptstruktur dieses ROV wird aus Acrylglas-Elementen gebildet. Die Einzelteile müssen entsprechend verklebt werden. Dabei ist der Kleber eher ein Lösungsmittel, dass das Material anlöst, so dass nach dem Aushärten eine geschlossene Masse an der Schnittstelle entsteht. Die Einzelteile werden also quasi miteinander verschweißt. Die nächsten Bilder zeigen die einzelnen Elemente, die dann später zusammengesetzt werden ... | |
|
OpenROV Gallerie öffnen |




|
| 12.Juli 2017 | |
| Nach dem Auspacken und Prüfen der Vollständigkeit, müssen natürlich erstmal die Akkus geladen werden. Erste Hürde an dieser Stelle: die Ladegeräte haben nur Netzstecker vom amerikanischen Typ. Aber wer hier schon scheitert ... | |
|
OpenROV Gallerie öffnen |

|
Eine auch nur auszugsweise Verwertung der gezeigten Bilder bedarf der Zustimmung des Rechteinhabers.